You might also like
- Modulo I Física IIDocument36 pagesModulo I Física IIrisaviNo ratings yet
- ACFrOgCLP4aj1zp4Z7Ra7Bq5SRbLcjMvJQ7cu9h24L0Vkf5MFSn9zHZjz0o4 wiuMac3jVy4G2owpISfhUjBQau8G N8Eqn1luwqVhJGUYNFdQ - 9ZaCALFWTmIF43Cy6MObtU3Z09Wrkuu8XZGN9Document13 pagesACFrOgCLP4aj1zp4Z7Ra7Bq5SRbLcjMvJQ7cu9h24L0Vkf5MFSn9zHZjz0o4 wiuMac3jVy4G2owpISfhUjBQau8G N8Eqn1luwqVhJGUYNFdQ - 9ZaCALFWTmIF43Cy6MObtU3Z09Wrkuu8XZGN9Alfonso JarabaNo ratings yet
- Reporte PenduloDocument7 pagesReporte PenduloRocio Jackelin Gutierrez Tovar100% (1)
- Ondas EstacionariasDocument10 pagesOndas EstacionariasparaelblackedNo ratings yet
- Lectura Tema 2 5 PropgacionYrotura TextDocument23 pagesLectura Tema 2 5 PropgacionYrotura TextEduardo Cosio ToledoNo ratings yet
- Taller 4 y 5 Ejercicios Solucionados 2013-1Document7 pagesTaller 4 y 5 Ejercicios Solucionados 2013-1Manu Fuentes83% (6)
- Ejercicios Certamen 1Document6 pagesEjercicios Certamen 1Camila Fernanda Toledo BustamanteNo ratings yet
- FisicaDocument2 pagesFisicaMARIA ISABELLA POSADA RENDON100% (1)
- Ejercicios de OndasDocument37 pagesEjercicios de OndasJuan Gomez100% (2)
- Ejercicios de EstadísticaDocument8 pagesEjercicios de EstadísticaAlex Salvador Oscco AstoNo ratings yet
- Solucionario Del Parcial de Fisica 2014 2Document13 pagesSolucionario Del Parcial de Fisica 2014 2VladiHChNo ratings yet
- Guia Problemas Exámen FinalDocument26 pagesGuia Problemas Exámen FinalHector Guerrero100% (3)
- 12e086066892a311 20220417 2105150GKe2Document39 pages12e086066892a311 20220417 2105150GKe2Wendy CedeñoNo ratings yet
- 3 Mov. AmortiguadoDocument4 pages3 Mov. AmortiguadoDaniel Ñahuis TisnadoNo ratings yet
- Taller Fisica de Mvimientos ParabolicosDocument13 pagesTaller Fisica de Mvimientos Parabolicosbrandon vinascoNo ratings yet
- Taller 1 - Física 3.Document6 pagesTaller 1 - Física 3.NATHALY GALVEZ SARRIANo ratings yet
- Taller de MAS, Amortiguadas y ForzadasDocument4 pagesTaller de MAS, Amortiguadas y ForzadasTatiana AcostaNo ratings yet
- Taller de M.A.S.Document6 pagesTaller de M.A.S.JULIO ERNESTO GÓMEZ MENDOZANo ratings yet
- Taller 4 y 5 Ejercicios Solucionados 2013 1 PDFDocument7 pagesTaller 4 y 5 Ejercicios Solucionados 2013 1 PDFLuisCarlosColqueCayoNo ratings yet
- PRÁCTICA 1-Fernando PayánDocument5 pagesPRÁCTICA 1-Fernando PayánedbepaNo ratings yet
- Oscilador AmortiguadoDocument6 pagesOscilador Amortiguadommartin_745550No ratings yet
- HuerfanoPliego Cloe M19S4PIDocument10 pagesHuerfanoPliego Cloe M19S4PICloe HuerfanoNo ratings yet
- Cap3 SedimentacionDocument18 pagesCap3 SedimentacionGerald Medina SandovalNo ratings yet
- Examen Final Jorge MiesesDocument6 pagesExamen Final Jorge MiesesJorge Luis Mieses RiveraNo ratings yet
- Trabajo Colaborativo Fase 3. Oscilaciones y TermodinámicaDocument14 pagesTrabajo Colaborativo Fase 3. Oscilaciones y TermodinámicaSebastián Barona VélezNo ratings yet
- Ecuación de OndasDocument6 pagesEcuación de OndasmaloaizaNo ratings yet
- PRACTICA INDIVIDUAL FM II Andre FernandezDocument15 pagesPRACTICA INDIVIDUAL FM II Andre FernandezLuis David Brito SaldivarNo ratings yet
- EcuaciÓn de Onda en Una Columna deDocument6 pagesEcuaciÓn de Onda en Una Columna deinguninorteNo ratings yet
- Examen ResueltoDocument3 pagesExamen ResueltoYody LSNo ratings yet
- Taller 4 y 5 Ejercicios Solucionados 2013 1Document7 pagesTaller 4 y 5 Ejercicios Solucionados 2013 1AntonioNo ratings yet
- Taller Oscilaciones Amortiguadas ForzadasDocument1 pageTaller Oscilaciones Amortiguadas ForzadasDAYANA LÓPEZ REALPENo ratings yet
- 8 Vibra2Document4 pages8 Vibra2Raul Ricardo Cuellar ReyesNo ratings yet
- Problemas Fisica ResnickDocument27 pagesProblemas Fisica ResnickRene Romero0% (1)
- Dimensionado de Presas de Tierra Homogéneas y HeterogéneasDocument8 pagesDimensionado de Presas de Tierra Homogéneas y HeterogéneasJonatan A. SlyNo ratings yet
- Informe Final MaferDocument9 pagesInforme Final MaferJose SotomayorNo ratings yet
- Ejercicios de LasticidadDocument21 pagesEjercicios de Lasticidadrigoberto torre palaciosNo ratings yet
- Calculo de La Carga de Un ElectrónDocument3 pagesCalculo de La Carga de Un ElectrónBennett Valverde Cristian JairoNo ratings yet
- Taller Vibraciones y Ondas I Sem 2014Document2 pagesTaller Vibraciones y Ondas I Sem 2014Juan FernandezNo ratings yet
- Taller Vibraciones y Ondas I Sem 2014 PDFDocument2 pagesTaller Vibraciones y Ondas I Sem 2014 PDFKmiSzNo ratings yet
- Hidráulica de CanalesDocument17 pagesHidráulica de CanalesRelojes PastoNo ratings yet
- Vibración Libre Con Amortiguamiento ViscosoDocument3 pagesVibración Libre Con Amortiguamiento Viscosovin_11910% (1)
- Ejercicios 1, 2, 3, 4, 5, 7, 8, 10Document13 pagesEjercicios 1, 2, 3, 4, 5, 7, 8, 10Duvan Camilo Vargas CelyNo ratings yet
- Taller Fisica 3 Oscilaciones Ver 4Document3 pagesTaller Fisica 3 Oscilaciones Ver 4Juan Sebastian Lopez SuarezNo ratings yet
- 4,5,6,7,8Document4 pages4,5,6,7,8Manuel Alejandro Navas CNo ratings yet
- Ayudantia 6 - Mecánica de Fluidos (Hidrostática II)Document11 pagesAyudantia 6 - Mecánica de Fluidos (Hidrostática II)Nicolás Ignacio Corte DíazNo ratings yet
- Muelles Helicoidales A CompresiónDocument31 pagesMuelles Helicoidales A CompresiónAna Maria Rivera SanchezNo ratings yet
- Letras Preg y Ejer C 13 Vib y Ond 2Document4 pagesLetras Preg y Ejer C 13 Vib y Ond 2G LNo ratings yet
- Problema MasDocument2 pagesProblema MasLuis Angel Farfan CandelarioNo ratings yet
- Variaciones RelacionadasDocument4 pagesVariaciones RelacionadasTotoxaHCNo ratings yet
- DocxDocument12 pagesDocxAndres NievaNo ratings yet
- Resolucion de Ejercicios. Tarea 2Document4 pagesResolucion de Ejercicios. Tarea 2Doris Elizabeth Mieles BasurtoNo ratings yet
- Experiencia de MillikanDocument10 pagesExperiencia de MillikanDaisy CruzNo ratings yet
- Taller 1.1 (2023)Document2 pagesTaller 1.1 (2023)Luis Felipe García ValenciaNo ratings yet
- Problemario EscurrimientosDocument8 pagesProblemario Escurrimientoslucho galindo floresNo ratings yet
- Ingeniería química. Soluciones a los problemas del tomo IFrom EverandIngeniería química. Soluciones a los problemas del tomo INo ratings yet
- Examen Final Diseño IIDocument2 pagesExamen Final Diseño IIFernando Alvarado0% (1)
- Sistemas de Anclaje PDFDocument15 pagesSistemas de Anclaje PDFFernando AlvaradoNo ratings yet
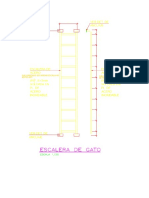
- Detalle de Escalera de GatoDocument2 pagesDetalle de Escalera de GatoFernando AlvaradoNo ratings yet
- Examen Final Diseño II (Resolución)Document4 pagesExamen Final Diseño II (Resolución)Fernando AlvaradoNo ratings yet
- Tabla de Conversion de UnidadesDocument2 pagesTabla de Conversion de UnidadesFernando AlvaradoNo ratings yet
- Empalmes de AceroDocument22 pagesEmpalmes de AceroFernando Alvarado100% (1)
- Misión y Visión de Las Universidades en La ActualidadDocument3 pagesMisión y Visión de Las Universidades en La ActualidadFernando AlvaradoNo ratings yet
- Mapa Conceptual Diferentes Tipos de InvestigaciónDocument8 pagesMapa Conceptual Diferentes Tipos de InvestigaciónFernando Alvarado0% (1)
- Problemas de Redes de Flujo en TaludDocument2 pagesProblemas de Redes de Flujo en TaludFernando AlvaradoNo ratings yet
- Ley 51 Caja de Seguro Social PDFDocument102 pagesLey 51 Caja de Seguro Social PDFFernando AlvaradoNo ratings yet
- Efecto de Las Fallas Geologicas en Las Obras CivilesDocument2 pagesEfecto de Las Fallas Geologicas en Las Obras CivilesFernando Alvarado80% (5)
- Asignación No. 1 Fernando Alvarado 8-228-414Document10 pagesAsignación No. 1 Fernando Alvarado 8-228-414Fernando AlvaradoNo ratings yet
- Diseño de DiqueDocument247 pagesDiseño de DiqueFernando AlvaradoNo ratings yet
- Tarea 1-Mecanica de RocasDocument2 pagesTarea 1-Mecanica de RocasFernando AlvaradoNo ratings yet
- Pilotes Bajos Cargas DinámicasDocument79 pagesPilotes Bajos Cargas DinámicasFernando AlvaradoNo ratings yet
- Informe Ensamble y Desensamble de Pantalla LCDDocument10 pagesInforme Ensamble y Desensamble de Pantalla LCDMiguel Andres Verano DiazNo ratings yet
- CV Arenas PDFDocument2 pagesCV Arenas PDFXavier QuispeNo ratings yet
- AccaDocument101 pagesAccaAnonymous DB1gyVYqspNo ratings yet
- Exploracion y Relaciones ComunitariasDocument24 pagesExploracion y Relaciones Comunitariasalberto torresNo ratings yet
- Trabajo Academico de Ingenieria Antisismica 2022 - 2Document10 pagesTrabajo Academico de Ingenieria Antisismica 2022 - 2dbdaaowuyb2256245766XDCVNSDEUANo ratings yet
- Ejercicios de FiorellaDocument20 pagesEjercicios de FiorellaCarlosTrejoCastellon100% (4)
- Guia 1 Economia Del Hogar Grado 9Document7 pagesGuia 1 Economia Del Hogar Grado 9Armando GuzmanNo ratings yet
- SintesisDocument6 pagesSintesislulu126100% (4)
- ACT#4Document18 pagesACT#4Azalia Lopez Rodriguez100% (2)
- Lista de VerificaciónDocument2 pagesLista de VerificaciónSara Vertel BenitezNo ratings yet
- Cuestionario ContabilidadDocument4 pagesCuestionario ContabilidadBaco LinxcoreNo ratings yet
- Presas o Centrales Hidroeléctricas de El SalvadorDocument4 pagesPresas o Centrales Hidroeléctricas de El SalvadorJvr Vasquez0% (1)
- 4 UltrafiltracionDocument9 pages4 Ultrafiltracionsofia umpireNo ratings yet
- Marco TeoricoDocument3 pagesMarco TeoricoYam Espino RoqueNo ratings yet
- Arquitectura de SoftwareDocument5 pagesArquitectura de SoftwareErick DamianNo ratings yet
- Solicita Se Fije Cuota Con Carácter Urgente de Alimentos ProvisionalesDocument5 pagesSolicita Se Fije Cuota Con Carácter Urgente de Alimentos ProvisionalesDiegoNo ratings yet
- Folleto de Practicas de MecanismosDocument19 pagesFolleto de Practicas de MecanismosSamuel Sanchez0% (1)
- LOGÍSTICA EMPRESARIAL Las Compras Su Administración y Organización.Document14 pagesLOGÍSTICA EMPRESARIAL Las Compras Su Administración y Organización.Espinoza Santamaria ArnaldoNo ratings yet
- Presentacion de RentaDocument11 pagesPresentacion de RentaAlvaro LopezNo ratings yet
- A B C B A B A D A C: Aparicio Champi, JavierDocument1 pageA B C B A B A D A C: Aparicio Champi, JavierMiler Accilio AlvaradoNo ratings yet
- Estructuras de Datos. SQLDocument63 pagesEstructuras de Datos. SQLRocioNo ratings yet
- Especialización Médica en Chile TiposDocument9 pagesEspecialización Médica en Chile TiposCristobal BravoNo ratings yet
- Caso Nexus 1Document13 pagesCaso Nexus 1daniel100% (1)
- Dimensionamiento Básico de Un Sistema NeumáticoDocument10 pagesDimensionamiento Básico de Un Sistema NeumáticoANGIE DANIELA AYALA NUÑEZNo ratings yet
- Práctica Preparación Del PacienteDocument4 pagesPráctica Preparación Del PacienteAlanGonzalezNo ratings yet
- 3 Examen Formulacion Unamba PDFDocument2 pages3 Examen Formulacion Unamba PDFYosemit Hery Moreano Carrasco100% (1)
- Tecnicas de VentaDocument1 pageTecnicas de VentaMISHELL ALEXANDRA TTITO AMAUNo ratings yet
- Guia #6 - Problemas PublicosDocument15 pagesGuia #6 - Problemas PublicosErika Vanessa HernándezNo ratings yet
- Sunshine Autos - GTA VCDocument4 pagesSunshine Autos - GTA VCDoubotzu50% (2)
- Regulación de Frecuencia y TensiónDocument9 pagesRegulación de Frecuencia y TensiónFelipe CortesNo ratings yet