You might also like
- Drone UavDocument20 pagesDrone UavPooja BanNo ratings yet
- DRONES UpdatedDocument13 pagesDRONES UpdatedAkarshit PachyalaNo ratings yet
- DroneDocument17 pagesDroneTanzeel KhanNo ratings yet
- QuadDocument55 pagesQuadVgokulGokulNo ratings yet
- Quadcopter 140410021020 Phpapp02Document20 pagesQuadcopter 140410021020 Phpapp02Pooja BanNo ratings yet
- "A Quadcopter Using K.K.2.1.5 Flight Controller".: A Project Presentation OnDocument17 pages"A Quadcopter Using K.K.2.1.5 Flight Controller".: A Project Presentation OnAkshay SinghalNo ratings yet
- Drone PresentationDocument31 pagesDrone PresentationMed Rabeh100% (1)
- Quadcopters PresentationDocument20 pagesQuadcopters PresentationManikVermaNo ratings yet
- Quad CopterDocument42 pagesQuad CopterShanaka JayasekaraNo ratings yet
- Presentation of Quadcopter DroneDocument17 pagesPresentation of Quadcopter DroneAkshay SinghalNo ratings yet
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocument10 pagesDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamNo ratings yet
- Een Oen 498 - Pre ProposalDocument14 pagesEen Oen 498 - Pre Proposalapi-296881750No ratings yet
- DRONES UpdatedDocument13 pagesDRONES UpdatedAkarshit PachyalaNo ratings yet
- Autonomous QuadcopterDocument22 pagesAutonomous QuadcopterRohan KoliNo ratings yet
- Manual - Quadcopters Review (Watermarked) PDFDocument28 pagesManual - Quadcopters Review (Watermarked) PDFQuads For Fun100% (3)
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocument24 pagesWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojNo ratings yet
- ArduCopterManual PDFDocument117 pagesArduCopterManual PDFWilson AndrésNo ratings yet
- VTOL Modeling (Student)Document5 pagesVTOL Modeling (Student)juanNo ratings yet
- DRS Pixhawk 2 17th March 2016Document29 pagesDRS Pixhawk 2 17th March 2016Nguyen Trong NghiaNo ratings yet
- DRONE PPT TTTTTTTTDocument15 pagesDRONE PPT TTTTTTTTPragatiNo ratings yet
- Arduino Drone With GPSDocument21 pagesArduino Drone With GPSFrancisco De Sousa JúniorNo ratings yet
- FPV Quadcopter Acronyms, Terminology, Glossary - Oscar LiangDocument17 pagesFPV Quadcopter Acronyms, Terminology, Glossary - Oscar Lianggumimacithj100% (1)
- FPV Cameras For DronesDocument5 pagesFPV Cameras For Dronesnapoleon_velasc3617100% (1)
- BICOPTERDocument22 pagesBICOPTERManideep Ananthula100% (4)
- Presentation On:-Drones: Prepared by - Akarsht Pachyala (CSE '30')Document9 pagesPresentation On:-Drones: Prepared by - Akarsht Pachyala (CSE '30')Akarshit PachyalaNo ratings yet
- 3Dr Radio: Quick Start GuideDocument4 pages3Dr Radio: Quick Start GuideLuiz Eduardo PinheiroNo ratings yet
- Arduino DroneDocument6 pagesArduino Dronemahesh giteNo ratings yet
- ME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter DronesDocument7 pagesME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter Dronesliuxc000No ratings yet
- Ambulance Drone Using Raspberry Pi 3 in Emergency HealthcareDocument4 pagesAmbulance Drone Using Raspberry Pi 3 in Emergency HealthcareAbhishek MishraNo ratings yet
- Autonomous Control of Quadcopter UAV PDFDocument56 pagesAutonomous Control of Quadcopter UAV PDFOla Sbihat100% (1)
- APM 2.5 Arducopter Guide v1.4Document42 pagesAPM 2.5 Arducopter Guide v1.4muhammadjadidNo ratings yet
- DroneDocument13 pagesDronebhavani velineniNo ratings yet
- Project Work-1Document21 pagesProject Work-1Sidhant Kumar SahooNo ratings yet
- Hydronav - Wingtra VTOL UAV1Document31 pagesHydronav - Wingtra VTOL UAV1yuda desmonNo ratings yet
- Unmanned Aerial VehicleDocument174 pagesUnmanned Aerial VehicleRiyad A. El-laithy100% (2)
- KapadiaDocument26 pagesKapadiaIshtila Sharara IqbalNo ratings yet
- PIXHAWK2 Assembly GuideDocument14 pagesPIXHAWK2 Assembly GuiderobertogleNo ratings yet
- Obstacles Detection2Document10 pagesObstacles Detection2Rahul SawantNo ratings yet
- Cetus X FPV Kit - Quick Start Guide (Betaflight Version)Document8 pagesCetus X FPV Kit - Quick Start Guide (Betaflight Version)tiger74.lieNo ratings yet
- Development of Isr For QuadcopterDocument9 pagesDevelopment of Isr For QuadcopterInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Study and Design of VTOLDocument33 pagesStudy and Design of VTOLvarunNo ratings yet
- Hybrid PID LQ Quadrotor ControllerDocument14 pagesHybrid PID LQ Quadrotor ControllerGhada BeydounNo ratings yet
- Quadrotor Thesis Uav PDFDocument193 pagesQuadrotor Thesis Uav PDFCLAUDE100% (1)
- Laporan Mekanika Elektronika (Autonomous Quadcopter Drone)Document44 pagesLaporan Mekanika Elektronika (Autonomous Quadcopter Drone)Sri Gandari Putri SyafardinahNo ratings yet
- Arduino DroneDocument16 pagesArduino DroneBằng Trần DuyNo ratings yet
- 12.4 Unmanned Aerial VehicleDocument18 pages12.4 Unmanned Aerial VehicleJose Luis FloresNo ratings yet
- Design and Development of UAV For Medical Application - Final Report PDFDocument88 pagesDesign and Development of UAV For Medical Application - Final Report PDFNagendraNo ratings yet
- UAV-Based Photogrammetric MappingDocument14 pagesUAV-Based Photogrammetric MappingFrida 'vree' Kurniawati100% (2)
- Proposal For Drone ResearchDocument5 pagesProposal For Drone ResearchRichard Myo ThantNo ratings yet
- How To Build Ardupilot With ArduinoDocument17 pagesHow To Build Ardupilot With ArduinoJosé Miguel Padilla CuetoNo ratings yet
- Arducopter PerametersDocument156 pagesArducopter PerameterssammyNo ratings yet
- UNMANNED AERIAL VEHICLEpptDocument25 pagesUNMANNED AERIAL VEHICLEpptAbhishek BahmaniNo ratings yet
- Project Presentation On "A Quadcopter Using K.K.2.1.5 Flight Controller"Document13 pagesProject Presentation On "A Quadcopter Using K.K.2.1.5 Flight Controller"Akshay SinghalNo ratings yet
- Project Presentation by AkshayDocument13 pagesProject Presentation by AkshayAkshay SinghalNo ratings yet
- Name - Akshay Singhal & Abhay Gupta Roll No. - 1708320004 & 1708320001Document17 pagesName - Akshay Singhal & Abhay Gupta Roll No. - 1708320004 & 1708320001Akshay SinghalNo ratings yet
- Synopsis QuadcopterDocument10 pagesSynopsis QuadcopterNamithaMahaleNo ratings yet
- Performance Analysis of Medium Altitude Low-Cost Autonomous QuadcopterDocument12 pagesPerformance Analysis of Medium Altitude Low-Cost Autonomous Quadcoptermuhammed sirac erenNo ratings yet
- UAV ReportDocument34 pagesUAV ReportJAYAPRABHAKARAN N NNo ratings yet
- Uadcopter Drone: (Electrical 6Th Sem.)Document51 pagesUadcopter Drone: (Electrical 6Th Sem.)Abhay GuptaNo ratings yet
- MICROPROCESSORDocument12 pagesMICROPROCESSORAbhishek GangwarNo ratings yet
- Jee Main 2019 AnswerDocument40 pagesJee Main 2019 AnswerAbhishek GangwarNo ratings yet
- The Schur-Cohn Algorithm: Appendix FDocument8 pagesThe Schur-Cohn Algorithm: Appendix FAbhishek GangwarNo ratings yet
- 338 InstsDocument189 pages338 InstsAbhishek GangwarNo ratings yet
- Interference-Free Flame Photometry of Calcium in Serum and UrineDocument12 pagesInterference-Free Flame Photometry of Calcium in Serum and UrineAbhishek GangwarNo ratings yet
- The DALI Guide: Artistic LicenceDocument12 pagesThe DALI Guide: Artistic LicenceAbhishek GangwarNo ratings yet
- SAP - ABAP CDS Development User Guide: WarningDocument91 pagesSAP - ABAP CDS Development User Guide: WarningKrishna Kshera SagareNo ratings yet
- Simulation Software and Engineering Expertise: A Marriage of NecessityDocument10 pagesSimulation Software and Engineering Expertise: A Marriage of NecessityIvana Esilda Velasco IllescasNo ratings yet
- Manual de Reparacion MCR Serie 32-33Document34 pagesManual de Reparacion MCR Serie 32-33Fernando Tapia Gibson100% (2)
- Leaf Energy: All-Purpose ModelDocument2 pagesLeaf Energy: All-Purpose ModeljhonNo ratings yet
- OxBlue Enhanced Security Monitoring Brochure 0 01Document3 pagesOxBlue Enhanced Security Monitoring Brochure 0 01jhNo ratings yet
- DCS OverviewDocument11 pagesDCS Overviewruslaninst100% (1)
- Moving From Standalone To Embedded Deployment in SAP Fiori For SAP S - 4HANADocument97 pagesMoving From Standalone To Embedded Deployment in SAP Fiori For SAP S - 4HANASueli100% (1)
- Manual Tecnologia Civic 2012Document6 pagesManual Tecnologia Civic 2012Mauricio Jesús Buzani RayonNo ratings yet
- B&R Automation Studio Target For SimulinkDocument76 pagesB&R Automation Studio Target For SimulinkAdrian MeleroNo ratings yet
- Generator Protection - 7UM85 - Technical DataDocument42 pagesGenerator Protection - 7UM85 - Technical DataDoan Anh TuanNo ratings yet
- It 14Document3 pagesIt 14Izza WrapNo ratings yet
- 18,21. Naidian CatalogueDocument31 pages18,21. Naidian CatalogueTaQuangDucNo ratings yet
- ScriptCase 9.6.018 Crack Serial Number Latest Keygen Download 2021Document1 pageScriptCase 9.6.018 Crack Serial Number Latest Keygen Download 2021DILANE PRO officielNo ratings yet
- Excel 2010 Data AnalysisDocument6 pagesExcel 2010 Data AnalysisHugo MartinsNo ratings yet
- Somerset West Tattersalls CC: Trading As Vegas BetsDocument8 pagesSomerset West Tattersalls CC: Trading As Vegas BetsBereng SekNo ratings yet
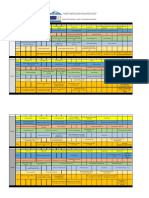
- Time Table Spring 2022-2023 V2Document3 pagesTime Table Spring 2022-2023 V2moad alsaityNo ratings yet
- Cross System Create Supplier ProcessDocument14 pagesCross System Create Supplier ProcesssakthiroboticNo ratings yet
- Parking Example - JAVADocument4 pagesParking Example - JAVAMuhammad Rana Farhan100% (1)
- A Comparative Study On Mobile Platforms (Android vs. IOS) : Smt. Annapurna, K.V.S. Pavan Teja, Dr. Y. Satyanarayana MurtyDocument7 pagesA Comparative Study On Mobile Platforms (Android vs. IOS) : Smt. Annapurna, K.V.S. Pavan Teja, Dr. Y. Satyanarayana MurtyAravindhNo ratings yet
- Android Project ReportDocument38 pagesAndroid Project ReportSahil Adlakha57% (7)
- Per 01a - Cargo Pumproom Entry PermitDocument3 pagesPer 01a - Cargo Pumproom Entry PermitRajesh NairNo ratings yet
- Jntuh 4-1 AttendanceDocument15 pagesJntuh 4-1 Attendancedodda12345No ratings yet
- AdaniDocument2 pagesAdaniathinabebaNo ratings yet
- Cisco SD-WAN Policy Architecture - Dana Yanch PDFDocument1 pageCisco SD-WAN Policy Architecture - Dana Yanch PDFEmilio PazNo ratings yet
- Alexa Howell: EducationDocument1 pageAlexa Howell: EducationAlexaNo ratings yet
- Final Mangonel Group ProjectDocument7 pagesFinal Mangonel Group ProjectAarohan Verma100% (2)
- New CVDocument3 pagesNew CVDhiraj ShindeNo ratings yet
- Fyp ProposalDocument37 pagesFyp ProposalNimra AzharNo ratings yet
- Help CenterDocument4 pagesHelp CenterShivali VermaNo ratings yet
- Citrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsDocument3 pagesCitrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsAnonymous rNmxZViYaNo ratings yet