You might also like
- Ndt-E-Pte-05a. Examen Especifico PT Level II - Rev 00 CetreDocument3 pagesNdt-E-Pte-05a. Examen Especifico PT Level II - Rev 00 CetreRusbel RiosNo ratings yet
- Unidad 4 - Introducción Al PandeoDocument38 pagesUnidad 4 - Introducción Al PandeoVictor M. CastroNo ratings yet
- Pacrial Calculo 3 Politecnico Gran Colombiano RevisadoDocument6 pagesPacrial Calculo 3 Politecnico Gran Colombiano RevisadoJUAN PABLONo ratings yet
- Presentacion 6 de JulioDocument14 pagesPresentacion 6 de JulioWilli Apupalo NaranjoNo ratings yet
- Presentacion 3 de AgostoDocument13 pagesPresentacion 3 de AgostoWilli Apupalo NaranjoNo ratings yet
- Rutinas GimnasioDocument10 pagesRutinas GimnasioWilli Apupalo NaranjoNo ratings yet
- Final 22 de JunioDocument17 pagesFinal 22 de JunioWilli Apupalo NaranjoNo ratings yet
- Informe Sin Formato Primer BimestreDocument16 pagesInforme Sin Formato Primer BimestreWilli Apupalo NaranjoNo ratings yet
- TrabajoAutonomo William Apupalo2BDocument5 pagesTrabajoAutonomo William Apupalo2BWilli Apupalo NaranjoNo ratings yet
- Domotica TerceDocument1 pageDomotica TerceWilli Apupalo NaranjoNo ratings yet
- Hmi Desarrollado en IntouchDocument2 pagesHmi Desarrollado en IntouchWilli Apupalo NaranjoNo ratings yet
- Formulas de VálvulasDocument2 pagesFormulas de VálvulasDiego ValdiviezoNo ratings yet
- Fundamentals of DNP3.en - EsDocument46 pagesFundamentals of DNP3.en - EsWilli Apupalo NaranjoNo ratings yet
- Hmi Desarrollado en IntouchDocument2 pagesHmi Desarrollado en IntouchWilli Apupalo NaranjoNo ratings yet
- Siemens CapturasDocument3 pagesSiemens CapturasWilli Apupalo NaranjoNo ratings yet
- TrabajoAutonomo William ApupaloDocument7 pagesTrabajoAutonomo William ApupaloWilli Apupalo NaranjoNo ratings yet
- Siemens CapturasDocument3 pagesSiemens CapturasWilli Apupalo NaranjoNo ratings yet
- Fundamentals of DNP3.en - EsDocument46 pagesFundamentals of DNP3.en - EsWilli Apupalo NaranjoNo ratings yet
- Componente IndividualDocument5 pagesComponente IndividualWilli Apupalo NaranjoNo ratings yet
- Ecuaciones ReactorDocument13 pagesEcuaciones ReactorWilli Apupalo NaranjoNo ratings yet
- Kano2010 en EsDocument14 pagesKano2010 en EsWilli Apupalo NaranjoNo ratings yet
- Cuestionario GR2Document18 pagesCuestionario GR2Willi Apupalo NaranjoNo ratings yet
- Prueba 5Document3 pagesPrueba 5Willi Apupalo NaranjoNo ratings yet
- LCD AssemblerDocument8 pagesLCD AssemblerWilli Apupalo NaranjoNo ratings yet
- Domotica TerceDocument1 pageDomotica TerceWilli Apupalo NaranjoNo ratings yet
- Intercambiadores de CalorDocument30 pagesIntercambiadores de CalorWilli Apupalo NaranjoNo ratings yet
- Conferencia RESUMENDocument7 pagesConferencia RESUMENWilli Apupalo NaranjoNo ratings yet
- Prepa 6Document4 pagesPrepa 6Willi Apupalo NaranjoNo ratings yet
- Bimestral Noviembre 2018Document3 pagesBimestral Noviembre 2018Willi Apupalo NaranjoNo ratings yet
- Help MatlabDocument4 pagesHelp MatlabWilli Apupalo NaranjoNo ratings yet
- Deber 1Document1 pageDeber 1Willi Apupalo NaranjoNo ratings yet
- AnexosDocument4 pagesAnexosWilli Apupalo NaranjoNo ratings yet
- Valores de NDocument2 pagesValores de NWilli Apupalo NaranjoNo ratings yet
- Funciones Químicas de Los HidrocarburosDocument13 pagesFunciones Químicas de Los HidrocarburosJangel M. LeónNo ratings yet
- Formula D - Reglas EstandarDocument16 pagesFormula D - Reglas EstandarFelix Martin GutierrezNo ratings yet
- Diseño en Albañileria ConfinadaDocument7 pagesDiseño en Albañileria ConfinadaEdgar Manuel Congona CuellarNo ratings yet
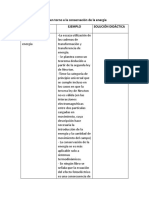
- Algunas Dificultades en Torno A La Conservación de La EnergíaDocument6 pagesAlgunas Dificultades en Torno A La Conservación de La EnergíaVidarte AdrianaNo ratings yet
- Fundamentos de Los Motores Paso A PasoDocument3 pagesFundamentos de Los Motores Paso A PasoMaferavgar LuppinNo ratings yet
- Informe Laboratorio Ensayo de TransformadoresDocument12 pagesInforme Laboratorio Ensayo de TransformadoresFausto SelettiNo ratings yet
- Comparacion de Rescate VehicularDocument2 pagesComparacion de Rescate VehicularAlvaro ArayaNo ratings yet
- Inv. QuimicaDocument8 pagesInv. QuimicaMariijo QuMnoNo ratings yet
- Reactor TubularDocument11 pagesReactor TubularFrancisco LaraNo ratings yet
- Cuestionario de Ensayo de TracciónDocument2 pagesCuestionario de Ensayo de Tracciónಆಂಡ್ರೆಸ್ ಮಾರ್ಕೊNo ratings yet
- Determinacion Del Contenido de Nitritos en Carne (Repaired)Document12 pagesDeterminacion Del Contenido de Nitritos en Carne (Repaired)Daniel Rubiano ArévaloNo ratings yet
- Laboratorio de FisicaDocument5 pagesLaboratorio de Fisicaaldair luis mendoza vitancioNo ratings yet
- TecnologiasInalambricas mODULACIONES PDFDocument65 pagesTecnologiasInalambricas mODULACIONES PDFJuan Manuel Hernandez B.No ratings yet
- Tabajo de Investigación, Fisica, Patrones de Unidades PalomaDocument10 pagesTabajo de Investigación, Fisica, Patrones de Unidades PalomaYohalmo DanielNo ratings yet
- Utilización de Harina de Haba (Vicia Faba L.) en La Elaboración de PanDocument8 pagesUtilización de Harina de Haba (Vicia Faba L.) en La Elaboración de PanMeidk LoreNo ratings yet
- Fuerza EléctricaDocument18 pagesFuerza EléctricaDaniel VargasNo ratings yet
- Cuadro ComparativoDocument1 pageCuadro ComparativoDaniel MendezNo ratings yet
- Trabajo Final de Tecnologia de ConcretoDocument9 pagesTrabajo Final de Tecnologia de ConcretoCris Alvares Garcia0% (1)
- Características Térmicas de Los MaterialesDocument8 pagesCaracterísticas Térmicas de Los MaterialesLENNIN NICOLSNo ratings yet
- Taller Tercer Periodo CN NovenoDocument3 pagesTaller Tercer Periodo CN NovenoAngie AldanaNo ratings yet
- Laboratorio 1Document63 pagesLaboratorio 1Jheimy Bernero100% (1)
- El Rotor A Jaula de Ardilla PDFDocument6 pagesEl Rotor A Jaula de Ardilla PDFclide_050793No ratings yet
- Plan de Contingencia UncDocument11 pagesPlan de Contingencia UncDanielito Diaz MontenegroNo ratings yet
- Actividad4 - Álgebra Superior. Ecuaciones CuadráticasDocument14 pagesActividad4 - Álgebra Superior. Ecuaciones CuadráticasJOSE ESPINOZANo ratings yet
- Guias de Aprendizaje de Ecuaciones Diferenciales Aplicadas 2017 II Martin Condori ConchaDocument87 pagesGuias de Aprendizaje de Ecuaciones Diferenciales Aplicadas 2017 II Martin Condori ConchaFrank Lima GomezNo ratings yet
- Cimentaciones Pilas Pilotes CajonesDocument19 pagesCimentaciones Pilas Pilotes CajonesHaselyNo ratings yet