You might also like
- IEEE - 219 1975 - Recommended Practice For Loudspeaker Measurements PDFDocument21 pagesIEEE - 219 1975 - Recommended Practice For Loudspeaker Measurements PDFGreg TsaiNo ratings yet
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Document91 pagesChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNo ratings yet
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocument27 pagesLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Development of Empirical Dynamic Models From Step Response DataDocument21 pagesDevelopment of Empirical Dynamic Models From Step Response DatadhiyaulNo ratings yet
- Transient and Steady-State Re-Sponse Analyses: Unit-Step Response of First-Order SystemsDocument12 pagesTransient and Steady-State Re-Sponse Analyses: Unit-Step Response of First-Order SystemsAhmed SaidNo ratings yet
- Lecture 6 - Feedback System PerformancesDocument28 pagesLecture 6 - Feedback System PerformancesMouadh WahraniNo ratings yet
- 7 - Transfer Function and State Space RepresentationsDocument41 pages7 - Transfer Function and State Space RepresentationsReem GheithNo ratings yet
- Experiment No: 6: D.C. Motor Position Control SystemDocument10 pagesExperiment No: 6: D.C. Motor Position Control SystemMayank ShahabadeeNo ratings yet
- KIG 4001 Control Engineering (Group 4) : Time Response AnalysisDocument29 pagesKIG 4001 Control Engineering (Group 4) : Time Response AnalysisNurul Iman Nur ElahiNo ratings yet
- Time Response, ME451: Instructor: Jongeun ChoiDocument84 pagesTime Response, ME451: Instructor: Jongeun ChoiJpradha KamalNo ratings yet
- MECN5015A - Chapter 4 - Lecture Slides 6 AprilDocument61 pagesMECN5015A - Chapter 4 - Lecture Slides 6 AprilGulain MayomboNo ratings yet
- Lecture 10Document43 pagesLecture 10eng fourmNo ratings yet
- CH4-Trans Resp PDFDocument53 pagesCH4-Trans Resp PDFLove StrikeNo ratings yet
- EET302 M2-Ktunotes - inDocument33 pagesEET302 M2-Ktunotes - inAkhilaNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- CONTROL SYSTEM Reprot 002Document10 pagesCONTROL SYSTEM Reprot 002HybaibNo ratings yet
- Chap 04 Marlin 2013Document45 pagesChap 04 Marlin 2013AnnuRawatNo ratings yet
- Chapter 3A SlidesDocument26 pagesChapter 3A Slidesيوسف الأحمديNo ratings yet
- Lecture 7Document40 pagesLecture 7eng fourmNo ratings yet
- Chapter 6 - Time ResponseDocument88 pagesChapter 6 - Time Responsevenosyah devanNo ratings yet
- Time ResponseDocument14 pagesTime ResponseRilwanNo ratings yet
- Lecture 8Document44 pagesLecture 8eng fourmNo ratings yet
- 2-Time Response - Chapter-5Document62 pages2-Time Response - Chapter-5omarlotfy455No ratings yet
- Chapter 6 - Time - Response - 2020 PDFDocument88 pagesChapter 6 - Time - Response - 2020 PDFtiraNo ratings yet
- IES-Previous Year Objective Paper-II (2016) - File PDFDocument24 pagesIES-Previous Year Objective Paper-II (2016) - File PDFhemuNo ratings yet
- Addis Ababa Science & Technology University: College of Electrical & Mechanical EngineeringDocument91 pagesAddis Ababa Science & Technology University: College of Electrical & Mechanical Engineeringliyou eshetuNo ratings yet
- Chapter4 - Time ResponseDocument60 pagesChapter4 - Time Responseعمر الفهدNo ratings yet
- Lecture 5Document41 pagesLecture 5eng fourmNo ratings yet
- Unidad 2 Parte 2Document63 pagesUnidad 2 Parte 2Miguel CorreaNo ratings yet
- Time Response of First Order Systems: R B X A XDocument3 pagesTime Response of First Order Systems: R B X A Xvktc •No ratings yet
- PTEE7301 April-2022Document3 pagesPTEE7301 April-2022imman46920No ratings yet
- Week 5 PDFDocument82 pagesWeek 5 PDFArnab RoyNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Lecture 2 - IV Part 1Document20 pagesLecture 2 - IV Part 1gks5kc8bhdNo ratings yet
- Reduced Order ModelingDocument65 pagesReduced Order ModelingVSNo ratings yet
- ACS Experiments 3,4Document5 pagesACS Experiments 3,4Aditya SharmaNo ratings yet
- Feedback Control Theory: A Computer System's PerspectiveDocument52 pagesFeedback Control Theory: A Computer System's PerspectiveAlberto Garcia CarrilloNo ratings yet
- Control Systems Lab Manual - With Challenging ExperimentsDocument132 pagesControl Systems Lab Manual - With Challenging ExperimentsP POORNA CHANDRA REDDYNo ratings yet
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniNo ratings yet
- ME451 L14 TimeResp1st 240116 183517Document4 pagesME451 L14 TimeResp1st 240116 183517epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Laboratory 3Document7 pagesLaboratory 3tsegayNo ratings yet
- Analysis and Applications of Laplace /fourier Transformations in Electric CircuitDocument7 pagesAnalysis and Applications of Laplace /fourier Transformations in Electric CircuitSwasti RanjanNo ratings yet
- Transient AnalysisDocument29 pagesTransient AnalysisDK White LionNo ratings yet
- Time Domain Analysis of Control SystemDocument25 pagesTime Domain Analysis of Control SystemEti'el Films / ኢትኤል ፊልሞችNo ratings yet
- Lecture 7 & 8 (Stability Analysis)Document35 pagesLecture 7 & 8 (Stability Analysis)muhammad hamzaNo ratings yet
- 02 - Steady Modes and Sliding FP12 450 Modes in The Relay Control Systems With Time DelayDocument6 pages02 - Steady Modes and Sliding FP12 450 Modes in The Relay Control Systems With Time Delayjap_thaygor5925No ratings yet
- Transfer Function 1Document24 pagesTransfer Function 1Ruben KandulnaNo ratings yet
- Time Domain Analysis of Control SystemDocument49 pagesTime Domain Analysis of Control Systemanasmos danielNo ratings yet
- The Laplace TransformsDocument61 pagesThe Laplace TransformsLouie Shaolin Lungao100% (1)
- Control Systems U2 (TEL306)Document80 pagesControl Systems U2 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- SYSID Lecture 04Document17 pagesSYSID Lecture 04samNo ratings yet
- A Direct Algorithm For Pole Placement by StatederivativeDocument9 pagesA Direct Algorithm For Pole Placement by StatederivativeMedo AnaNo ratings yet
- Chap 04 Marlin 2002Document44 pagesChap 04 Marlin 2002Audrey Patrick KallaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- A Brief Review of Laplace TransformsDocument10 pagesA Brief Review of Laplace TransformsSupriya AnandNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Application Example: Pneumatic - 2-Finger Parallel GripperDocument27 pagesApplication Example: Pneumatic - 2-Finger Parallel GripperhazaaNo ratings yet
- User Manual Part 1: Pasi Sharepoint 2010 Internet PortalDocument26 pagesUser Manual Part 1: Pasi Sharepoint 2010 Internet PortalhazaaNo ratings yet
- Meie5121 Mcte4150 Sp18 HydraulicDocument22 pagesMeie5121 Mcte4150 Sp18 HydraulichazaaNo ratings yet
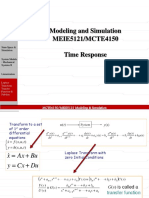
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Effect of Unified Power Quality Conditioner in Smart Grid Operation and ControlDocument5 pagesEffect of Unified Power Quality Conditioner in Smart Grid Operation and ControlDrAshok Kumar TiwariNo ratings yet
- Effect of Heater Geometry On The High Temperature Distribution On A MEMS Micro-HotplateDocument6 pagesEffect of Heater Geometry On The High Temperature Distribution On A MEMS Micro-HotplateJorge GuerreroNo ratings yet
- RF Amplifier Design Using HFA3046, HFA3096, HFA3127, HFA3128 Transistor ArraysDocument4 pagesRF Amplifier Design Using HFA3046, HFA3096, HFA3127, HFA3128 Transistor ArraysbezasamiNo ratings yet
- InstallDocument2 pagesInstallambonsolehNo ratings yet
- Load Cells Types, How It Works, and ApplicationsDocument21 pagesLoad Cells Types, How It Works, and ApplicationsEncardio RiteNo ratings yet
- Antenna SpecificationsDocument3 pagesAntenna SpecificationsRobertNo ratings yet
- Saddle Finisher q2 q4 GTC GCDDocument20 pagesSaddle Finisher q2 q4 GTC GCDutilscNo ratings yet
- ST Journal of Research 4.1 - Wireless Sensor NetworksDocument164 pagesST Journal of Research 4.1 - Wireless Sensor Networksclara_colombo1996No ratings yet
- Traction Control of Electric Vehicle Based On The Estimation of Road Surface ConditionDocument8 pagesTraction Control of Electric Vehicle Based On The Estimation of Road Surface ConditionMahta SafrullahNo ratings yet
- Example Settings For Applying The SEL-487B To A Six-Breaker BusDocument24 pagesExample Settings For Applying The SEL-487B To A Six-Breaker Busu2andresNo ratings yet
- Lab ReportDocument4 pagesLab ReportPearl ArcamoNo ratings yet
- Shunt CompensationDocument13 pagesShunt CompensationDeptiranjan MohapatraNo ratings yet
- HANDBOOKDocument31 pagesHANDBOOKCineide FerreiraNo ratings yet
- Bulletin 800F 22.5 MM Push ButtonsDocument3 pagesBulletin 800F 22.5 MM Push ButtonsRex BernedoNo ratings yet
- PCAAD6 ManualDocument105 pagesPCAAD6 ManualIván IvanovNo ratings yet
- DR: Abdelkarim Daud: Predictive MaintenanceDocument8 pagesDR: Abdelkarim Daud: Predictive MaintenanceMohammed ShantiNo ratings yet
- General System ArchitectureDocument28 pagesGeneral System ArchitectureroshsaumNo ratings yet
- BC557 DatasheetDocument5 pagesBC557 DatasheetArya WidyatmakaNo ratings yet
- (Automatic Identification System) : The Sealite AdvantageDocument3 pages(Automatic Identification System) : The Sealite AdvantagenzuriyakifoNo ratings yet
- Drillstring VibrationsDocument4 pagesDrillstring VibrationsLoganBohannonNo ratings yet
- Cylinder - CS2 PDFDocument25 pagesCylinder - CS2 PDFFelipe Costa de MeirelesNo ratings yet
- Science 8Document2 pagesScience 8Karena WahimanNo ratings yet
- MBC6 BulletinDocument4 pagesMBC6 BulletinGugun GunawanNo ratings yet
- KedinginanDocument2 pagesKedinginanAmir Bambang YudhoyonoNo ratings yet
- Data Sheet: MPS 225 E2 20 - 126645Document8 pagesData Sheet: MPS 225 E2 20 - 126645ZOO4YOU AnimalXXXNo ratings yet
- Design of Power System Stabilizer Using Power Rate Reaching Law Based Sliding Mode Control TechniqueDocument6 pagesDesign of Power System Stabilizer Using Power Rate Reaching Law Based Sliding Mode Control TechniqueIrfan QureshiNo ratings yet
- Robot Sensing and SensorsDocument56 pagesRobot Sensing and SensorsChirila AndreiNo ratings yet
- IFU Rev A - G30E-G40E ISC Rel A.01 - EnglishDocument204 pagesIFU Rev A - G30E-G40E ISC Rel A.01 - Englishtechnicalservice.pnpNo ratings yet
- Fibre Optic Cable - LSHFDocument4 pagesFibre Optic Cable - LSHFPaul KwongNo ratings yet