You might also like
- Chapter 12Document20 pagesChapter 12Lê Đình TiếnNo ratings yet
- Chapter 01Document71 pagesChapter 01Lê Đình TiếnNo ratings yet
- Chapter 13Document56 pagesChapter 13Lê Đình TiếnNo ratings yet
- Chapter 14Document26 pagesChapter 14Lê Đình TiếnNo ratings yet
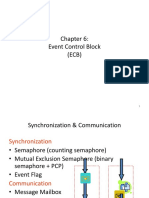
- Chapter 06Document33 pagesChapter 06Lê Đình TiếnNo ratings yet
- Chapter 11Document25 pagesChapter 11Lê Đình TiếnNo ratings yet
- Chapter 09Document35 pagesChapter 09Lê Đình TiếnNo ratings yet
- Chapter 10Document15 pagesChapter 10Lê Đình TiếnNo ratings yet
- Chapter 07Document18 pagesChapter 07Lê Đình TiếnNo ratings yet
- Chapter 03Document78 pagesChapter 03Lê Đình TiếnNo ratings yet
- Chapter 05Document18 pagesChapter 05Lê Đình TiếnNo ratings yet
- Lab 1 PresentationDocument39 pagesLab 1 PresentationLê Đình TiếnNo ratings yet
- Why Vlsi? Moore'S Law. Why Fpgas? The Vlsi and System Design ProcessDocument33 pagesWhy Vlsi? Moore'S Law. Why Fpgas? The Vlsi and System Design ProcessLê Đình TiếnNo ratings yet
- ch3. Process ManagementDocument34 pagesch3. Process ManagementLê Đình TiếnNo ratings yet
- ch5. Kernel SynchronizationDocument51 pagesch5. Kernel SynchronizationLê Đình TiếnNo ratings yet
- Operating System ConceptsDocument81 pagesOperating System ConceptsLê Đình TiếnNo ratings yet
- ch4. Process SchedulingDocument75 pagesch4. Process SchedulingLê Đình TiếnNo ratings yet
- ch2. Getting Started With The KernelDocument10 pagesch2. Getting Started With The KernelLê Đình TiếnNo ratings yet
- ch1. Introduction To The Linux KernelDocument13 pagesch1. Introduction To The Linux KernelLê Đình TiếnNo ratings yet
- 3310 Chapter 2Document88 pages3310 Chapter 2Muhammad Ishaq KhanNo ratings yet
- 3310 Chapter 1Document68 pages3310 Chapter 1Lê Đình TiếnNo ratings yet
- 3310 Chapter 3Document58 pages3310 Chapter 3Lê Đình TiếnNo ratings yet
- 10 1 1 465 1866Document5 pages10 1 1 465 1866Lê Đình TiếnNo ratings yet
- 3310 Chapter 4 PDFDocument11 pages3310 Chapter 4 PDFLê Đình TiếnNo ratings yet
- 10 1 1 899 5456 PDFDocument156 pages10 1 1 899 5456 PDFLê Đình TiếnNo ratings yet
- Cross Eye Jamming EffectivenessDocument10 pagesCross Eye Jamming Effectivenessabhinav140284No ratings yet
- A10GX PCIE E3p1Document49 pagesA10GX PCIE E3p1Lê Đình TiếnNo ratings yet
- Analysis/Synthesis Filter Bank Design Based On Time Domain Aliasing CancellationDocument9 pagesAnalysis/Synthesis Filter Bank Design Based On Time Domain Aliasing CancellationLê Đình TiếnNo ratings yet
- 10 1109@icosp 2008 4697162Document5 pages10 1109@icosp 2008 4697162Lê Đình TiếnNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Drone Survival GuideDocument2 pagesDrone Survival GuidevthiseasNo ratings yet
- Post Quiz Threads PDFDocument5 pagesPost Quiz Threads PDFshubham_narkhedeNo ratings yet
- Laundry Center Dryer Tech Data Sheet: NO - Normally Open NTC - NTC Thermistor MCF - Machine Configuration FileDocument40 pagesLaundry Center Dryer Tech Data Sheet: NO - Normally Open NTC - NTC Thermistor MCF - Machine Configuration FilePedro IsmaelNo ratings yet
- WEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEDocument6 pagesWEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEMuhd Alif MikhailNo ratings yet
- Bc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreDocument60 pagesBc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreSimonaMauna33% (3)
- SeptalkanDocument5 pagesSeptalkanReniNo ratings yet
- Vocabulary Levels Tests Versions 1 2Document12 pagesVocabulary Levels Tests Versions 1 2Rangsiya PjewNo ratings yet
- 3 Tan 8.3 Tan108 Tan 8 - 1 3tan 8.3: Single Choice CorrectDocument3 pages3 Tan 8.3 Tan108 Tan 8 - 1 3tan 8.3: Single Choice CorrectShehbaz ThakurNo ratings yet
- Cibse TM65 (2020)Document67 pagesCibse TM65 (2020)Reli Hano100% (1)
- Breuer - Sun & Shadow (Inglés) PDFDocument18 pagesBreuer - Sun & Shadow (Inglés) PDFccorrea74No ratings yet
- Industrial ReactorsDocument10 pagesIndustrial ReactorssarahNo ratings yet
- DAC AnalysisDocument19 pagesDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుNo ratings yet
- Links of XII Physics Investigatory Project Allowtment 2Document3 pagesLinks of XII Physics Investigatory Project Allowtment 2yashtomarsoop07No ratings yet
- Position, Velocity and AccelerationDocument12 pagesPosition, Velocity and Accelerationpeter vuNo ratings yet
- External Gear Pumps For Open Loop Hydraulic SystemsDocument2 pagesExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNo ratings yet
- Post Covid StrategyDocument12 pagesPost Covid Strategyadei667062No ratings yet
- Solutions Tutorial 6Document9 pagesSolutions Tutorial 6Nur Aqilah Abdullah HashimNo ratings yet
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- Getting Good Grades in School Is What Kids Are Supposed To Be Doing.Document6 pagesGetting Good Grades in School Is What Kids Are Supposed To Be Doing.The QUEENNo ratings yet
- Super 6 Comprehension StrategiesDocument1 pageSuper 6 Comprehension StrategiesrosypatelNo ratings yet
- Series Portable Oscilloscopes: Keysight DSO1000A/BDocument15 pagesSeries Portable Oscilloscopes: Keysight DSO1000A/BNestor CardenasNo ratings yet
- Assignment 9 Nomor 1Document2 pagesAssignment 9 Nomor 1Alexander Steven ThemasNo ratings yet
- Omnifocus ShortcutsDocument3 pagesOmnifocus ShortcutsLaGouloueNo ratings yet
- Solar Water Heater MOU LaodiceaDocument2 pagesSolar Water Heater MOU LaodiceaZeeshan YasinNo ratings yet
- Methley Railway Station: A Proposal To The Department For Transport.Document38 pagesMethley Railway Station: A Proposal To The Department For Transport.Rt Hon. Alec Shelbrooke, M.P.0% (1)
- Artuz Albert PDFDocument4 pagesArtuz Albert PDFJasmin Kate DatuinNo ratings yet
- SVC200Document5 pagesSVC200fransiskus_ricky3329No ratings yet
- Siasun Company IntroDocument34 pagesSiasun Company IntromoneeshveeraNo ratings yet
- Exercicios de PhonicsDocument51 pagesExercicios de Phonicsms. TeixeiraNo ratings yet
- Section 02870 Site FurnishingsDocument19 pagesSection 02870 Site FurnishingsMØhãmmed ØwięsNo ratings yet