You might also like
- Ajuste de FuncionesDocument6 pagesAjuste de FuncionesAlejandro Abril100% (1)
- Exponer Interpolacion y Aproximacion PolinomialDocument17 pagesExponer Interpolacion y Aproximacion PolinomialwolfstarprojectsNo ratings yet
- Interpolación LinealDocument5 pagesInterpolación Linealmaynenita0% (1)
- MN Trabajo FinalDocument14 pagesMN Trabajo FinalCarlos ChapaNo ratings yet
- InterpolaciónDocument14 pagesInterpolaciónOscar HdezNo ratings yet
- PACRDocument5 pagesPACRPedro Antonio cofre RojasNo ratings yet
- Apuntes 4 Interpolacion Metodos NumericosDocument27 pagesApuntes 4 Interpolacion Metodos Numericosnarvaezalviz1042No ratings yet
- Analisis NumericoDocument11 pagesAnalisis NumericoNathashaLetoNo ratings yet
- Polinomios de InterpolacionDocument59 pagesPolinomios de InterpolacionOliviaSanMiguelHerbasNo ratings yet
- Interpolación numéricaDocument20 pagesInterpolación numéricaAnonymous MuJwZt7D1iNo ratings yet
- Interpol Ac I OnDocument8 pagesInterpol Ac I OnEdwin Ramiro Torrico VargasNo ratings yet
- IntroduccionDocument4 pagesIntroduccionEza Chapiz HernandezNo ratings yet
- ContenidoDocument8 pagesContenidoEmerson MoralesNo ratings yet
- INTERPOLACIÓNDocument4 pagesINTERPOLACIÓNmc ivan bNo ratings yet
- Metodos NumericosDocument6 pagesMetodos NumericosGerardo MartinezNo ratings yet
- Interpolación y ajuste de funciones mediante polinomios de Newton, Lagrange y splinesDocument8 pagesInterpolación y ajuste de funciones mediante polinomios de Newton, Lagrange y splinesRosendo100% (1)
- InterpolaciónDocument29 pagesInterpolaciónGerwin AlcalaNo ratings yet
- INTERPOLACIONDocument10 pagesINTERPOLACIONAna Rebeca Millan Marquez.No ratings yet
- Sesión 03 - Métodos de Interpolación y ExtrapolaciónDocument16 pagesSesión 03 - Métodos de Interpolación y Extrapolaciónjulio.15.10.02No ratings yet
- Tarea 5 Metodos de InterpolacionDocument14 pagesTarea 5 Metodos de InterpolacionAna SantanaNo ratings yet
- Actividad 1U3Document18 pagesActividad 1U3Sergio Jose Vazquez HerreraNo ratings yet
- Ajuste de Curvas e InterpolaciónDocument8 pagesAjuste de Curvas e InterpolaciónFranciscoFrankyGomezAyalaNo ratings yet
- Ajuste de Curvas e InterpolaciónDocument5 pagesAjuste de Curvas e InterpolaciónJuankiOrzuNo ratings yet
- Ajustes de CurvasDocument14 pagesAjustes de CurvasMarthaGuijarroAltamiranoNo ratings yet
- Interpolación polinómicaDocument28 pagesInterpolación polinómicaGerwin AlcalaNo ratings yet
- Interpolacion de LagrangeDocument3 pagesInterpolacion de LagrangeMarlyu GuzmanNo ratings yet
- U4-Interpolacion Lineal y CuadráticaDocument4 pagesU4-Interpolacion Lineal y Cuadráticadavid_valdez_83No ratings yet
- Polinomio de Interpolación de NewtonDocument9 pagesPolinomio de Interpolación de NewtonJuan Carlos Lluncor AcaroNo ratings yet
- Trazador CubicoDocument5 pagesTrazador CubicoDiego OrtizNo ratings yet
- La Interpolacion LinealDocument13 pagesLa Interpolacion LinealGilder GonzalezNo ratings yet
- InterpolaciónDocument17 pagesInterpolacióncarlosleonteamobebe100% (1)
- Interpol Ac I OnDocument9 pagesInterpol Ac I OnJudimel Muñoz GuayambalNo ratings yet
- Clases Cn-Primera ParteDocument9 pagesClases Cn-Primera ParteAngie Nohelia Pilligua BasurtoNo ratings yet
- Metodos de Interpolacion PolinomialDocument22 pagesMetodos de Interpolacion PolinomialEduardo Sanchez ParritaNo ratings yet
- Polinomio de Interpolación de Newton - FisicaDocument20 pagesPolinomio de Interpolación de Newton - FisicaFANNY CECILIA RAMIREZ MARTINEZNo ratings yet
- Interpolación y Ajuste de FuncionesDocument17 pagesInterpolación y Ajuste de FuncionesJose AlvarezNo ratings yet
- Análisis numérico interpolaciónDocument5 pagesAnálisis numérico interpolaciónElvis PerezNo ratings yet
- Análisis numérico: introducción a la regresión por mínimos cuadradosDocument14 pagesAnálisis numérico: introducción a la regresión por mínimos cuadradosJuan Carlos Rufasto CastroNo ratings yet
- Investigación de InterpolaciónDocument17 pagesInvestigación de InterpolaciónGuillermo Jesus Lopez SantosNo ratings yet
- Interpolacion de Lagrange CoregidoDocument12 pagesInterpolacion de Lagrange CoregidoEfrain CastilloNo ratings yet
- 4.1 Ajuste de FuncionesDocument21 pages4.1 Ajuste de FuncionesAlex MotaNo ratings yet
- Teoría de La InterpolaciónDocument10 pagesTeoría de La InterpolaciónDayanna95No ratings yet
- Trabajo de Interpolacion de LagrangeDocument8 pagesTrabajo de Interpolacion de Lagrangejaviercarlos18No ratings yet
- InterpolaciónDocument8 pagesInterpolacióncukisincNo ratings yet
- Métodos numéricos: interpolaciónDocument15 pagesMétodos numéricos: interpolaciónJose SuarezNo ratings yet
- Interpolación polinomial con diferencias divididas de NewtonDocument11 pagesInterpolación polinomial con diferencias divididas de NewtonDamian AzcuetaNo ratings yet
- Tema 4 - Ajuste de Funciones - Metodos NumericosDocument11 pagesTema 4 - Ajuste de Funciones - Metodos NumericosMelaniNo ratings yet
- A - Ejemplos InterpolacionDocument22 pagesA - Ejemplos InterpolacionKatherine Zumiko Cadillo BaltazarNo ratings yet
- Ajuste de Curvas e InterpolacionDocument10 pagesAjuste de Curvas e InterpolacionBenjamín RondónNo ratings yet
- Ajustes de Curvas e InterpolacionDocument15 pagesAjustes de Curvas e InterpolacionAlberto DavidNo ratings yet
- Spline SDocument19 pagesSpline SpaomilagrosNo ratings yet
- Interpolación y Ajuste de CurvasDocument11 pagesInterpolación y Ajuste de Curvasjurguen jacomeNo ratings yet
- Unidad 2 Analisis NumericoDocument14 pagesUnidad 2 Analisis Numericoemmy_flores_1No ratings yet
- Unidad 4 Ajuste de Curvas e InterpolaciónDocument8 pagesUnidad 4 Ajuste de Curvas e InterpolaciónDanny MurciaNo ratings yet
- INTERPOLACIONDocument4 pagesINTERPOLACIONranyer153100% (1)
- Interpolación polinómicaDocument7 pagesInterpolación polinómicaJenniffer Tatiana Cruz AlvaresNo ratings yet
- Metodos de InterpolacionDocument13 pagesMetodos de InterpolacionNataly FernandaNo ratings yet
- Lagrange RevisarDocument5 pagesLagrange RevisarAdrihanaPaladinesNo ratings yet
- Guia de Impacto de Un ChorroDocument10 pagesGuia de Impacto de Un Chorroluis enrique quispe quispeNo ratings yet
- Ejercicios HIDRAULICA IDocument40 pagesEjercicios HIDRAULICA Iluis enrique quispe quispeNo ratings yet
- Hoja Metrados PuentesDocument17 pagesHoja Metrados Puentesluis enrique quispe quispeNo ratings yet
- Vertederos PDFDocument43 pagesVertederos PDFDaril C. AcostaNo ratings yet
- Practica de Laboratorio de Energia II Turbina PeltonDocument17 pagesPractica de Laboratorio de Energia II Turbina Peltonluis enrique quispe quispeNo ratings yet
- Aditivos para El Concreto PDFDocument87 pagesAditivos para El Concreto PDFluis enrique quispe quispeNo ratings yet
- Derivación e Integración NuméricasDocument4 pagesDerivación e Integración Numéricasluis enrique quispe quispeNo ratings yet
- Edafologia 1Document104 pagesEdafologia 1Luis Enrique Quispe QuispeNo ratings yet
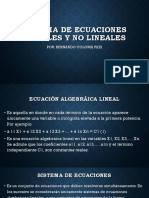
- Sistema de Ecuaciones Lineales y No LinealesDocument13 pagesSistema de Ecuaciones Lineales y No Linealesluis enrique quispe quispeNo ratings yet
- Seleccion de Maquinaria AgricolaDocument7 pagesSeleccion de Maquinaria AgricolagemlavaniNo ratings yet
- Seleccion de Maquinaria AgricolaDocument25 pagesSeleccion de Maquinaria Agricolaluis enrique quispe quispeNo ratings yet
- Correguido Guia de Aparato de Friccion de Fluidos CorregidoDocument7 pagesCorreguido Guia de Aparato de Friccion de Fluidos Corregidoluis enrique quispe quispe100% (2)
- 0070412035MAQAG Maquinaria Agrícola P12 A12 CronDocument9 pages0070412035MAQAG Maquinaria Agrícola P12 A12 Cronluis enrique quispe quispeNo ratings yet
- 1.1 Emprendimiento y LiderazgoDocument18 pages1.1 Emprendimiento y Liderazgoluis enrique quispe quispeNo ratings yet
- 1.1 Emprendimiento y LiderazgoDocument15 pages1.1 Emprendimiento y Liderazgoluis enrique quispe quispeNo ratings yet
- 1.1 Emprendimiento y LiderazgoDocument15 pages1.1 Emprendimiento y Liderazgoluis enrique quispe quispeNo ratings yet
- Regimen Critico y Energia EspecificaDocument22 pagesRegimen Critico y Energia Especificaluis enrique quispe quispeNo ratings yet
- Chisaguano Luis, 5to, Nocturna, Informe 4Document6 pagesChisaguano Luis, 5to, Nocturna, Informe 4David ChisaguanoNo ratings yet
- 1° PRACTICA - 20 Casos PrácticosDocument10 pages1° PRACTICA - 20 Casos PrácticosLionel LopezNo ratings yet
- PMSD-329_TRABAJO FINALDocument6 pagesPMSD-329_TRABAJO FINALluisregalos20242024No ratings yet
- Honda City 2017 Mexico Ficha TecnicaDocument4 pagesHonda City 2017 Mexico Ficha TecnicaKarla May GutiérrezNo ratings yet
- Acta reunión seguimiento casos TechedgeDocument4 pagesActa reunión seguimiento casos TechedgegabriocNo ratings yet
- Tecnologia Wimax - Semana4.1Document22 pagesTecnologia Wimax - Semana4.1Andres Alarico MafaldoNo ratings yet
- 2 Modulacion PSK2 PDFDocument22 pages2 Modulacion PSK2 PDFMelina Villca HernandezNo ratings yet
- Nticx TP 9Document4 pagesNticx TP 9Mariana FierroNo ratings yet
- Bsi g07 EsDocument13 pagesBsi g07 EsJavier InzaurgaratNo ratings yet
- Grant Robert - Dirección Estratégica - Capitulo 7Document46 pagesGrant Robert - Dirección Estratégica - Capitulo 7Johan ManuelNo ratings yet
- Circuitos con transistores: Identificación, mediciones y funcionamientoDocument7 pagesCircuitos con transistores: Identificación, mediciones y funcionamientojuan jose romani parejaNo ratings yet
- Computer Hoy N599 2021Document76 pagesComputer Hoy N599 2021ferNo ratings yet
- Informe Robot PDFDocument80 pagesInforme Robot PDFCamila LaraNo ratings yet
- Cl-Exp-Pets-Log-13 Logueo GeotecnicoDocument8 pagesCl-Exp-Pets-Log-13 Logueo GeotecnicoJhon ChávezNo ratings yet
- Factura Electrónica de Venta No.: ALMACENES EXITO S.A NIT 890.900.608 - 9 - NIT 890900608-9Document1 pageFactura Electrónica de Venta No.: ALMACENES EXITO S.A NIT 890.900.608 - 9 - NIT 890900608-9Juan Diego Serrano LeónNo ratings yet
- Plan de acción para el liderazgo de cambioDocument9 pagesPlan de acción para el liderazgo de cambioLaura Alejandra RubioNo ratings yet
- Manual Identificacion y Control de EepDocument50 pagesManual Identificacion y Control de EepIvonne SilvaNo ratings yet
- Registro DiscapacidadDocument34 pagesRegistro DiscapacidadJohanna Paola Castillo BocanegraNo ratings yet
- La Tecnología y La SistematizaciónDocument1 pageLa Tecnología y La SistematizaciónSarahiZamoranNo ratings yet
- Codificación de Números EnterosDocument3 pagesCodificación de Números EnterosUnai MorilloNo ratings yet
- Programacion de Celulares (Teoria)Document6 pagesProgramacion de Celulares (Teoria)GoTiCoXrNo ratings yet
- Manual CeconarDocument21 pagesManual CeconarAdelaide RamirezNo ratings yet
- Guia 1 Ponchar Cable Utp Segun NormasDocument2 pagesGuia 1 Ponchar Cable Utp Segun NormasYuzed SuarezNo ratings yet
- Protocolo Servicio Al Cliente Afiliado Correccion 13 de AgostoDocument15 pagesProtocolo Servicio Al Cliente Afiliado Correccion 13 de AgostoAlexa CJNo ratings yet
- Sqa - Mediacion de CalidadDocument5 pagesSqa - Mediacion de CalidadCarlos Garcia RNo ratings yet
- Tu Pedido de Amazon - Com.mx N.º 701-6701260-7983437 de 1 ProductoDocument2 pagesTu Pedido de Amazon - Com.mx N.º 701-6701260-7983437 de 1 ProductoRicardo J. VillanuevaNo ratings yet
- Parejas Liberales Matrimonio Whatsapp en MadridDocument2 pagesParejas Liberales Matrimonio Whatsapp en MadridEroticoNo ratings yet
- Practica #7 3.5.1Document3 pagesPractica #7 3.5.1eljediNo ratings yet
- Resumen de clases sobre sistemas de softwareDocument26 pagesResumen de clases sobre sistemas de softwareRocío MoralesNo ratings yet
- Enunciado Caso Práctico - Opcional - M2T1 - COORDINACIÓN DE ARCHIVOS Y MODELADO ESTRUCTURALDocument3 pagesEnunciado Caso Práctico - Opcional - M2T1 - COORDINACIÓN DE ARCHIVOS Y MODELADO ESTRUCTURALmauricio arce erquiciaNo ratings yet