You might also like
- End Winding Vibration Hydro GeneratorDocument5 pagesEnd Winding Vibration Hydro Generatorpatel chandramaniNo ratings yet
- Motor WindingsDocument12 pagesMotor WindingsAbiodun IloriNo ratings yet
- Calculation of Cogging TorqueDocument4 pagesCalculation of Cogging TorqueMehdi SepehriNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- Unit 3 SRMDocument66 pagesUnit 3 SRMDr SriNo ratings yet
- Wound Rotor Motor TestingDocument5 pagesWound Rotor Motor Testingbige1911No ratings yet
- Understanding Shaft Voltage and Grounding Currents of Turbine GeneratorsDocument12 pagesUnderstanding Shaft Voltage and Grounding Currents of Turbine GeneratorsArni 2020No ratings yet
- Average Synchronous Torque of Synchronous Machines, With Particular Reference To Reluctance MachinesDocument3 pagesAverage Synchronous Torque of Synchronous Machines, With Particular Reference To Reluctance MachinesAbhishek AgarwalNo ratings yet
- Hysteresis MotorDocument14 pagesHysteresis Motorcamming soon100% (1)
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Electrical Machines Induction and Synchronous MachinesDocument42 pagesElectrical Machines Induction and Synchronous MachinesYoshua DylanNo ratings yet
- ABB - General Purpose Motors Cast Iron - GB 092003Document49 pagesABB - General Purpose Motors Cast Iron - GB 092003ivanjaviergutierrezoNo ratings yet
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoDocument6 pagesNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- The Knee Point Here Gives The Rated SpeedDocument2 pagesThe Knee Point Here Gives The Rated SpeedtankimsinNo ratings yet
- Thermal Analysis of Electrical Machines Limits and Heat Transfer PrinciplesDocument2 pagesThermal Analysis of Electrical Machines Limits and Heat Transfer PrinciplesAnonymous sAmJfcVNo ratings yet
- Synchronous Reluctance Motor PDFDocument17 pagesSynchronous Reluctance Motor PDFVamsi Kattamuri100% (4)
- Determining The Efficiency of Induction Machines, Converters and SoftstartersDocument8 pagesDetermining The Efficiency of Induction Machines, Converters and Softstarterssadeq03No ratings yet
- DC Motor PrimerDocument26 pagesDC Motor PrimerastroltravlerNo ratings yet
- Unit2 MachinesDocument35 pagesUnit2 MachinesdineshkumarNo ratings yet
- Design of Synchronous MachinesDocument17 pagesDesign of Synchronous MachinesNiteshNarukaNo ratings yet
- Induction Motor Cogging and CrawlingDocument2 pagesInduction Motor Cogging and CrawlingChandaKundaNo ratings yet
- Three Phase Induction MotorDocument21 pagesThree Phase Induction MotorPrianshu JyosyulaNo ratings yet
- Importance of Insulation Resistance Testing2Document25 pagesImportance of Insulation Resistance Testing2FaisalNo ratings yet
- Hysteresis MotorDocument27 pagesHysteresis MotorSubham GhoshNo ratings yet
- Current Lead and Lag ConceptDocument2 pagesCurrent Lead and Lag ConceptUsman AmeenNo ratings yet
- DC MachinesDocument52 pagesDC MachinesArun Kumar100% (1)
- Antologc3ada Poc3a9tica 27 TextoDocument100 pagesAntologc3ada Poc3a9tica 27 TextoLukaz JuarezNo ratings yet
- EE6512-Electrical Machines LaboratoryDocument82 pagesEE6512-Electrical Machines LaboratoryGopinath B L NaiduNo ratings yet
- SRM Using Arduino PDFDocument9 pagesSRM Using Arduino PDFChristian AztecaNo ratings yet
- Reluctance MotorDocument16 pagesReluctance Motorapi-382713280% (5)
- Motor Data Sheet 1A 1#360kW, 4pole, 6600VDocument3 pagesMotor Data Sheet 1A 1#360kW, 4pole, 6600Vasyyas100% (1)
- Induction Motor Tradeoff For VSD Driven Pumps and Fans PDFDocument5 pagesInduction Motor Tradeoff For VSD Driven Pumps and Fans PDFkankokwahNo ratings yet
- Switched Reluctance Reluctance Motors and ControlDocument47 pagesSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Damper Winding Influence On UMPDocument8 pagesDamper Winding Influence On UMPSrinivas KamarsuNo ratings yet
- H T Drives PDFDocument58 pagesH T Drives PDFDipikaNo ratings yet
- PMBLDC Motor DriveDocument55 pagesPMBLDC Motor DriveSushant SinghNo ratings yet
- Single Phase I.M. Understanding LevelDocument3 pagesSingle Phase I.M. Understanding LevelK S Ravi Kumar (MVGR EEE)No ratings yet
- Unbalanced Magnetic Pull and Air-Gap Monitoring For Large HydrogeneratorsDocument2 pagesUnbalanced Magnetic Pull and Air-Gap Monitoring For Large HydrogeneratorsbasilecoqNo ratings yet
- 开关磁阻电机的ANSOFT建模方法Document28 pages开关磁阻电机的ANSOFT建模方法Nuwantha FernandoNo ratings yet
- 4E Roadmap For Motors and VFD 231115 v3Document30 pages4E Roadmap For Motors and VFD 231115 v3Carlos LopezNo ratings yet
- Electrical Machine ApplicationsDocument9 pagesElectrical Machine Applicationssmile4ever54100% (34)
- Lecture 6 - Induction MotorsDocument34 pagesLecture 6 - Induction Motorsswamy_satya20004521No ratings yet
- 45 24985 EE328 2016 1 2 1 Lecture7Document11 pages45 24985 EE328 2016 1 2 1 Lecture7Shimaa ashrafNo ratings yet
- Generalized PDFDocument14 pagesGeneralized PDFgurunathan1414% (7)
- Electrical SteelDocument193 pagesElectrical SteelpavanupadhyeNo ratings yet
- A Review of Structural and Thermal Analysis of Traction MotorsDocument11 pagesA Review of Structural and Thermal Analysis of Traction MotorsGari PastranaNo ratings yet
- Induction MotorDocument7 pagesInduction MotoruwaifotonyNo ratings yet
- The Basics of Stepping MotorsDocument6 pagesThe Basics of Stepping MotorsSherif EltoukhiNo ratings yet
- Biot Savart LawDocument3 pagesBiot Savart LawArdani MunaqiNo ratings yet
- Switched Reluctance Motor (SRM)Document8 pagesSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahNo ratings yet
- A.C. Series MotorDocument16 pagesA.C. Series MotorM BNo ratings yet
- Synchronous Reluctance MotorDocument9 pagesSynchronous Reluctance Motorkarthikeyan249No ratings yet
- Transformer FaultsDocument11 pagesTransformer FaultsMusembiNo ratings yet
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Cellular Actuators: Modularity and Variability in Muscle-inspired ActuationFrom EverandCellular Actuators: Modularity and Variability in Muscle-inspired ActuationNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Proposal Confrence InternasionalDocument8 pagesProposal Confrence InternasionalAndi FalihNo ratings yet
- SMA Inverter DatasheetDocument4 pagesSMA Inverter DatasheetAndi FalihNo ratings yet
- Lecture 4: Transformers: Instructor: Dr. Gleb V. Tcheslavski ContactDocument96 pagesLecture 4: Transformers: Instructor: Dr. Gleb V. Tcheslavski ContactAndi FalihNo ratings yet
- Turbine WheelDocument1 pageTurbine WheelAndi FalihNo ratings yet
- Matlab Reading Data BinaryDocument22 pagesMatlab Reading Data BinaryAndi FalihNo ratings yet
- Bbe Bbe Sound Inc Welding System Supa Charger Users Manual 480894Document12 pagesBbe Bbe Sound Inc Welding System Supa Charger Users Manual 480894Aaron Caballero GarciaNo ratings yet
- SCR ApplicationsDocument26 pagesSCR ApplicationsRodz Gier JrNo ratings yet
- Early Radio Receivers, Called Crystal Radios, Used A "Cat's Whisker" of Fine Wire Pressing On A Crystal ofDocument4 pagesEarly Radio Receivers, Called Crystal Radios, Used A "Cat's Whisker" of Fine Wire Pressing On A Crystal ofPoonam bhavsarNo ratings yet
- MOC3042Document7 pagesMOC3042Sunu PradanaNo ratings yet
- Master Control Cummins PowerDocument4 pagesMaster Control Cummins Powervivaldoms144No ratings yet
- B011 000 16 50 01205 - Rev 2Document1 pageB011 000 16 50 01205 - Rev 2GLOBUS ENGINEERSNo ratings yet
- DS3 DSheet Flatpack2 System Integrated v5Document2 pagesDS3 DSheet Flatpack2 System Integrated v5Eng M ElseaidyNo ratings yet
- PE Rectifier 5Document4 pagesPE Rectifier 5Pallab RoyNo ratings yet
- Aparat Sudura Tecnica - 144-164Document21 pagesAparat Sudura Tecnica - 144-164florin071No ratings yet
- 4N33Document6 pages4N33prems112No ratings yet
- Intercom ATKINSON PDFDocument28 pagesIntercom ATKINSON PDFjulioramcaNo ratings yet
- Protection of Wind Electric Plants: PSRC Working Group C25Document82 pagesProtection of Wind Electric Plants: PSRC Working Group C25bansalrNo ratings yet
- Security Door Controls: Installation Instructions SERIES 1510, 1570, 1580 EMLOCKDocument4 pagesSecurity Door Controls: Installation Instructions SERIES 1510, 1570, 1580 EMLOCKSunday ChanNo ratings yet
- TC544A / TC244AX / TC344AX Temperature Controllers: FeaturesDocument2 pagesTC544A / TC244AX / TC344AX Temperature Controllers: FeaturesSanthanam GaneshNo ratings yet
- Diagrama ElectricoDocument1 pageDiagrama ElectricoLuis Angel Calderon AlarconNo ratings yet
- Tpss Jatibening Baru Power Cable Connection ListDocument8 pagesTpss Jatibening Baru Power Cable Connection ListHapidz ErwinNo ratings yet
- MBPTH TMPR SensorDocument5 pagesMBPTH TMPR SensorROBIN JAMESNo ratings yet
- Sample - Inspection Checklist - Electrical Boxes and DisconnectsDocument2 pagesSample - Inspection Checklist - Electrical Boxes and DisconnectsSunny TiwariNo ratings yet
- Datasheet PDFDocument3 pagesDatasheet PDFMahdi AlizadehNo ratings yet
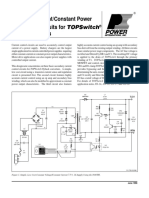
- Constant Current/Constant Power Regulation Circuits For: TopswitchDocument16 pagesConstant Current/Constant Power Regulation Circuits For: TopswitchBharat Singh AhluwaliaNo ratings yet
- Compliance To SEC 48-TMSS-01 Rev 0Document5 pagesCompliance To SEC 48-TMSS-01 Rev 0AHMED YOUSEFNo ratings yet
- NHA91857-08 PowerLogic SC150 Installation GuideDocument2 pagesNHA91857-08 PowerLogic SC150 Installation GuidemsiantexNo ratings yet
- Repair Manual For LG Brand DryerDocument46 pagesRepair Manual For LG Brand DryerTucsonTycoonNo ratings yet
- Capacitor Simulink Diagram For TransientsDocument2 pagesCapacitor Simulink Diagram For Transientsn m g kumarNo ratings yet
- Aiwa Chasis g5m-s27000Document5 pagesAiwa Chasis g5m-s27000templpa100% (1)
- A Simple and Cheap Dark-Detecting LED Circuit - Evil Mad Scientist LaboratoriesDocument22 pagesA Simple and Cheap Dark-Detecting LED Circuit - Evil Mad Scientist LaboratoriesnoufutanurNo ratings yet
- Test 1Document20 pagesTest 1Farah Diba Pos-PosNo ratings yet
- Lecture1424353332 PDFDocument101 pagesLecture1424353332 PDFamulya00428No ratings yet
- Eaton CatalogDocument70 pagesEaton CatalogGregorNo ratings yet
- 78 S 40Document9 pages78 S 40Luis AlbertoNo ratings yet