You might also like
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Energy Conversion One: Chapter NineDocument15 pagesEnergy Conversion One: Chapter NineSneh Deep SKNo ratings yet
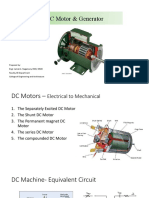
- DC MotorDocument15 pagesDC Motorptarwatkar123No ratings yet
- Energy Conversion One: Chapter NineDocument29 pagesEnergy Conversion One: Chapter NinejennybunnyomgNo ratings yet
- Shri Dadaji Institute of Technology & Science: Seminar OnDocument18 pagesShri Dadaji Institute of Technology & Science: Seminar OnJayesh JainNo ratings yet
- DC DriveDocument36 pagesDC DriveferdiNo ratings yet
- An Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorDocument34 pagesAn Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorP.s. PeriasamyNo ratings yet
- Chapter 8 - DC Motors and GeneratorsDocument80 pagesChapter 8 - DC Motors and GeneratorsZargham RanaNo ratings yet
- Chapter 7 - DC Motors - PDFDocument28 pagesChapter 7 - DC Motors - PDFAmmar SafwtNo ratings yet
- EE-260 Lecture 36 Chapter 09Document17 pagesEE-260 Lecture 36 Chapter 09Hamza BashirNo ratings yet
- DC MotorsDocument39 pagesDC Motorsapi-3827132100% (11)
- DC Motor PresentationDocument31 pagesDC Motor PresentationDony Beast (DurraniFared)No ratings yet
- Module 2 - Series DC MotorDocument8 pagesModule 2 - Series DC MotorMARY JOY MAGAWAYNo ratings yet
- Modellng of DC MotorsDocument29 pagesModellng of DC MotorsKunal Kumar GehlotNo ratings yet
- DC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesDocument34 pagesDC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesMohammed- KannanNo ratings yet
- 04 Kecepatan Torsi InduksiDocument19 pages04 Kecepatan Torsi Induksifancy boxNo ratings yet
- Ac DC DriveDocument92 pagesAc DC DriveUmang JainNo ratings yet
- Chapter 5Document34 pagesChapter 5Jayshon Montemayor100% (1)
- DC MachineDocument33 pagesDC MachineSlim ShaddysNo ratings yet
- DC MotorDocument47 pagesDC MotorArun SaraswathyNo ratings yet
- DC MachinesDocument19 pagesDC MachinesMoses MberwaNo ratings yet
- DC MotorGeneratorDocument32 pagesDC MotorGeneratorna zafiraNo ratings yet
- Assignment3 EMIDocument6 pagesAssignment3 EMISaurav SomeshNo ratings yet
- DC Motors: RLB EDocument6 pagesDC Motors: RLB Ehafiz_jaaffarNo ratings yet
- Chapter11 PDFDocument39 pagesChapter11 PDFSai KiranNo ratings yet
- EET 421 Power Electronic Drives: Indra NisjaDocument48 pagesEET 421 Power Electronic Drives: Indra Nisjaaswardi8756No ratings yet
- DC Drives PDFDocument90 pagesDC Drives PDFkeerthi50% (2)
- Electric Machine: DC MotorDocument42 pagesElectric Machine: DC Motorteza maruNo ratings yet
- Chapter 9: DC Motors (Only) : Motor Is Assumed Constant, Because It Help SimplifiesDocument66 pagesChapter 9: DC Motors (Only) : Motor Is Assumed Constant, Because It Help SimplifiesMuhammad R Shihadeh100% (1)
- لقطة شاشة 2023-02-09 في 1.00.13 ص PDFDocument24 pagesلقطة شاشة 2023-02-09 في 1.00.13 ص PDFsajjad aakulNo ratings yet
- Unit 3Document5 pagesUnit 3Narasimman DonNo ratings yet
- EECE 269 - Lec - DC MotorDocument38 pagesEECE 269 - Lec - DC Motorsayedul abrarNo ratings yet
- Practical Activity 2 DC Shunt Motor PLMDocument9 pagesPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- AEEE 352 Assignment 3Document10 pagesAEEE 352 Assignment 3mchris91No ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- PPT1 Unit 3 DC Motor Working, Types, Torque and Speed Equation, Applications, CharacteristicsDocument47 pagesPPT1 Unit 3 DC Motor Working, Types, Torque and Speed Equation, Applications, CharacteristicsRAMESH BABU EEENo ratings yet
- DC MotorDocument27 pagesDC MotorAnonymous AFFiZn100% (2)
- Lecture Notes Elec A6: Induction MachinesDocument39 pagesLecture Notes Elec A6: Induction MachinesRam PrasadNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Energy Conversion One: Synchronous MotorsDocument21 pagesEnergy Conversion One: Synchronous MotorsSaurav KafleNo ratings yet
- Problemas Con MotoresDocument34 pagesProblemas Con MotoresJohn HuaricapchaNo ratings yet
- Basics of A Electric Motor: Dcmotor 1Document47 pagesBasics of A Electric Motor: Dcmotor 1selraj0708No ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Power Systems TheoryDocument13 pagesPower Systems TheoryGitta JoshuaNo ratings yet
- DC Motors and Generators Chapter # 9Document13 pagesDC Motors and Generators Chapter # 9SamiNo ratings yet
- Lecture 6 Speed Control of DC MotorDocument64 pagesLecture 6 Speed Control of DC MotorYulianto KentosNo ratings yet
- DC MachinesDocument49 pagesDC MachinesAshfaq AbibNo ratings yet
- Unit 2 - ED - 2ND PARTDocument21 pagesUnit 2 - ED - 2ND PARTMohit L.E. 008No ratings yet
- Chapter 4Document24 pagesChapter 4javeria zafeerNo ratings yet
- The Direct Current (DC) Motor - Principle of OperationDocument5 pagesThe Direct Current (DC) Motor - Principle of OperationEdison EstrellaNo ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- DC Motors: - Construction Very Similar To A DC GeneratorDocument35 pagesDC Motors: - Construction Very Similar To A DC GeneratorDeepak Ganachari100% (1)
- Lab 12 - Universal MotorDocument8 pagesLab 12 - Universal MotorSanjeev Kumar Jha50% (2)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power Electronics and Electric Drives for Traction ApplicationsFrom EverandPower Electronics and Electric Drives for Traction ApplicationsNo ratings yet
- Takserempak1fase 44pDocument43 pagesTakserempak1fase 44pEvan KanigaraNo ratings yet
- Benefits of Operating Your Generator at A Higher Power FactorDocument3 pagesBenefits of Operating Your Generator at A Higher Power FactorMohd ShahidNo ratings yet
- A. Cover - 2Document9 pagesA. Cover - 2Evan KanigaraNo ratings yet
- Excitation System Models of Synchronous Generator: September 2018Document5 pagesExcitation System Models of Synchronous Generator: September 2018Evan KanigaraNo ratings yet
- CR4 - Thread - Excitation TransformerDocument3 pagesCR4 - Thread - Excitation TransformerEvan KanigaraNo ratings yet
- Bantilan Maureen Lhee RDocument8 pagesBantilan Maureen Lhee RAlexa Anne Louise BercillaNo ratings yet
- Key Shortcuts WinDocument26 pagesKey Shortcuts WinrockskartikNo ratings yet
- Lesson PlanDocument11 pagesLesson PlanKim Gabrielle Del PuertoNo ratings yet
- Service and Technology Marketing Service and Technology MarketingDocument27 pagesService and Technology Marketing Service and Technology MarketingVinudeep MalalurNo ratings yet
- Lesson4 1515Document14 pagesLesson4 1515gm hashNo ratings yet
- Procedure Issuing EtaDocument5 pagesProcedure Issuing EtaCarlos FrançaNo ratings yet
- Manual Diagrama Detector de MetalesDocument18 pagesManual Diagrama Detector de MetalesEdmundo Cisneros0% (1)
- Pipeline Construction InspecDocument48 pagesPipeline Construction InspecAliDadKhan100% (2)
- Applied-Signed Product Cordial Labeling and - Santhi.mDocument6 pagesApplied-Signed Product Cordial Labeling and - Santhi.mImpact JournalsNo ratings yet
- List of BooksDocument13 pagesList of Booksbharan16No ratings yet
- Overseas Assignment 18thseptDocument6 pagesOverseas Assignment 18thseptSuresh VanierNo ratings yet
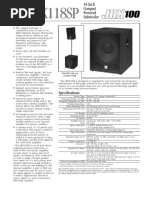
- JRX118SP SpecsheetDocument2 pagesJRX118SP SpecsheetLuisNo ratings yet
- 01-Toy Product DesignDocument54 pages01-Toy Product DesignJuanNo ratings yet
- Data Science: Lecture #1Document22 pagesData Science: Lecture #1khanjan varmaNo ratings yet
- Acm 003Document5 pagesAcm 003Roan BNo ratings yet
- 4 Chacon Et Al 2004Document7 pages4 Chacon Et Al 2004Luis Serrano CortezNo ratings yet
- SCCA2103 Leadership CommunicationDocument6 pagesSCCA2103 Leadership CommunicationsarahNo ratings yet
- ECM 206 Site VisitDocument36 pagesECM 206 Site VisitAZUAN BIN AHMAD FAUZI100% (2)
- UT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)Document7 pagesUT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)UT Dallas Provost's Technology GroupNo ratings yet
- ApolloBVM PDFDocument41 pagesApolloBVM PDFShiva KumarNo ratings yet
- MP35N K Tube Technical Data SheetDocument2 pagesMP35N K Tube Technical Data Sheetstrip1No ratings yet
- Boolean Operators Literature ReviewDocument8 pagesBoolean Operators Literature Reviewc5qz47sm100% (1)
- Probability spaces and σ-algebras: Scott SheffieldDocument12 pagesProbability spaces and σ-algebras: Scott SheffieldRikta DasNo ratings yet
- Practicality and Efficiency: Presented By: Grace EscabasDocument11 pagesPracticality and Efficiency: Presented By: Grace EscabasMiaeNo ratings yet
- Sebu6100-02 MDocument74 pagesSebu6100-02 MSa CruCerNo ratings yet
- Mcs Text BookDocument309 pagesMcs Text Bookkancha_basu2447100% (1)
- BCO120Document3 pagesBCO120erwin_simsensohnNo ratings yet
- Learner's Book Answers: Unit 1 CellsDocument31 pagesLearner's Book Answers: Unit 1 CellsLyaz Antony91% (91)
- Cop4600 Exam1 sp13Document2 pagesCop4600 Exam1 sp13chavNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet