You might also like
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Fuzzy LogicDocument6 pagesFuzzy LogicjagadeeshNo ratings yet
- Ahtiwash Abdulmuin2001 Chapter AnAdaptiveNeuro FuzzyApproachFDocument10 pagesAhtiwash Abdulmuin2001 Chapter AnAdaptiveNeuro FuzzyApproachFRoman TilahunNo ratings yet
- Project2-Level Tank With Fuzzy ControllerpdfDocument20 pagesProject2-Level Tank With Fuzzy ControllerpdfAbeng YogtaNo ratings yet
- IA ArticuloDocument4 pagesIA ArticuloAndres FlorezNo ratings yet
- Lec 2Document26 pagesLec 2sk2417No ratings yet
- EE 466/586 VLSI Design: School of EECS Washington State University Pande@eecs - Wsu.eduDocument46 pagesEE 466/586 VLSI Design: School of EECS Washington State University Pande@eecs - Wsu.eduPhạm Đức ThuậnNo ratings yet
- Fahad Al Ghazali FPGA Implementation of Least Mean Square FIRDocument2 pagesFahad Al Ghazali FPGA Implementation of Least Mean Square FIRFahad GhazaliNo ratings yet
- FulltextDocument20 pagesFulltextapi-3731916No ratings yet
- ANFISDocument19 pagesANFISMuhammadIrsyadRNo ratings yet
- Lab 5Document11 pagesLab 5Waleed Bashir KotlaNo ratings yet
- Feel Safe PlanningDocument14 pagesFeel Safe PlanningDiamond SalehNo ratings yet
- Xilinx DSP Workbook AdaptiveDocument4 pagesXilinx DSP Workbook Adaptiveamreshjha22No ratings yet
- NFA User's ManualDocument21 pagesNFA User's ManualIlias KonsoulasNo ratings yet
- Anfis StructureDocument5 pagesAnfis Structuresecret 31No ratings yet
- Lab2 UpdatedDocument5 pagesLab2 UpdatedSekar PrasetyaNo ratings yet
- Cycle1 ManualDocument24 pagesCycle1 ManualSanthosh krishna. UNo ratings yet
- FI 02-Merged PDFDocument218 pagesFI 02-Merged PDFCNo ratings yet
- Balancing of An Inverted Pendulum With A SCARA Robot: Bernhard Sprenger, Ladislav Kucera, and Safer MouradDocument6 pagesBalancing of An Inverted Pendulum With A SCARA Robot: Bernhard Sprenger, Ladislav Kucera, and Safer Mouradhophuong_dhvNo ratings yet
- ASSIGNMENT 2.docx - VerilogDocument2 pagesASSIGNMENT 2.docx - VerilogfiitnessbynehaNo ratings yet
- Fuzzy Control For A Liquid Level System: January 2003Document7 pagesFuzzy Control For A Liquid Level System: January 2003Nồi NguyễnNo ratings yet
- Pendulum PaperDocument7 pagesPendulum Paperapi-3832828No ratings yet
- Fuzzy Vs PD Controller Design HomeworkDocument28 pagesFuzzy Vs PD Controller Design HomeworkNvlArchNo ratings yet
- Fuzzy Logic Controller For The Inverted PendulumDocument8 pagesFuzzy Logic Controller For The Inverted PendulumrameshsmeNo ratings yet
- Eeb 252Document2 pagesEeb 252Vivek SharmaNo ratings yet
- Hei 5 Esea Task I: Course and Analysis QuestionsDocument2 pagesHei 5 Esea Task I: Course and Analysis QuestionsogataNo ratings yet
- WISEM-2020-21 ECE2010 ETH VL2020211000161 Reference Material I 10-Nov-2020 Unit-1-New1Document56 pagesWISEM-2020-21 ECE2010 ETH VL2020211000161 Reference Material I 10-Nov-2020 Unit-1-New1Deepak PraiseNo ratings yet
- Lesson Plan: S.N Date Planne D Topic Date Engage D Remark SDocument28 pagesLesson Plan: S.N Date Planne D Topic Date Engage D Remark SVARUN B MNo ratings yet
- Guida A Xfoil (Guide To Xfoil)Document28 pagesGuida A Xfoil (Guide To Xfoil)Giovanni ViciconteNo ratings yet
- A Fuzzy Robust Controller For Robotic SystemsDocument6 pagesA Fuzzy Robust Controller For Robotic SystemsIJAERS JOURNALNo ratings yet
- SCICOS - A Dynamic System Builder and Simulator User's GuideDocument15 pagesSCICOS - A Dynamic System Builder and Simulator User's Guideradhakanta_phy8453No ratings yet
- Lab 3-4Document15 pagesLab 3-4Asad RehanNo ratings yet
- Control of Non-Linear System Using Backstepping: Anamika Vyas Ojha, Achala KhandelwalDocument5 pagesControl of Non-Linear System Using Backstepping: Anamika Vyas Ojha, Achala KhandelwalYoucef BenanibaNo ratings yet
- Distributed Model Predictive Control of Load Frequency of Power NetworkDocument6 pagesDistributed Model Predictive Control of Load Frequency of Power Networkmairaj muftiNo ratings yet
- Simulink4Controlnew2008 1pageDocument12 pagesSimulink4Controlnew2008 1pageBambang Hidayat NoegrohoNo ratings yet
- Adaptive Neurofuzzy Tracking Control of Load Frequency Controller For An Isolated Power System NetworkDocument12 pagesAdaptive Neurofuzzy Tracking Control of Load Frequency Controller For An Isolated Power System NetworkAbba-Gana MohammedNo ratings yet
- Experiment No. 2 Defining Linear - Time Invariant Systems in TF (Transfer Function) and ZPK (Zero-Pole-Gain) FormsDocument4 pagesExperiment No. 2 Defining Linear - Time Invariant Systems in TF (Transfer Function) and ZPK (Zero-Pole-Gain) FormsVikram SainiNo ratings yet
- Convergence Parameters of DFT CalculationsDocument6 pagesConvergence Parameters of DFT CalculationsFebriman ZendratoNo ratings yet
- Control Unit: The Control Unit Is A Sequential Circuit Which Initiates All Micro-Operations in The Data ProcessorDocument14 pagesControl Unit: The Control Unit Is A Sequential Circuit Which Initiates All Micro-Operations in The Data ProcessormarahimruNo ratings yet
- Cmos CH 4Document46 pagesCmos CH 4Pinak RoyNo ratings yet
- 1 Simulink For Process ControlDocument10 pages1 Simulink For Process Controlehsilv005No ratings yet
- Matlab Homework Assignment: Homework Specific Tasks/assignmentsDocument2 pagesMatlab Homework Assignment: Homework Specific Tasks/assignmentsDavid Chon0% (1)
- Labsheet Exp1Document12 pagesLabsheet Exp1REDWAN AHMED MIAZEENo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- DSP Lab - ScilabDocument17 pagesDSP Lab - ScilabSai Nikshipth MaddhugaruNo ratings yet
- ANFIS Based Distillation Column Control: R. Sivakumar K. BaluDocument7 pagesANFIS Based Distillation Column Control: R. Sivakumar K. BaluEr Mayur PatilNo ratings yet
- Control With Random Communication Delays Via A Discrete-Time Jump System ApproachDocument6 pagesControl With Random Communication Delays Via A Discrete-Time Jump System ApproachArshad AliNo ratings yet
- XC 9572Document8 pagesXC 9572api-3710567No ratings yet
- 005 Fpga Spartan Verilog 2003Document41 pages005 Fpga Spartan Verilog 2003Thiyagarajan VelayuthamNo ratings yet
- Achairformyskincare ThesisDocument4 pagesAchairformyskincare ThesisAchairformy SkincareNo ratings yet
- SmartCtrl User Manual PDFDocument90 pagesSmartCtrl User Manual PDFGustavo LimaNo ratings yet
- Chapter 5Document48 pagesChapter 5hub23No ratings yet
- ECE147C/ME106A Project #1: Two-Cart With Spring: Jo Ao Hespanha and Bassam Bamieh April 12, 2007Document5 pagesECE147C/ME106A Project #1: Two-Cart With Spring: Jo Ao Hespanha and Bassam Bamieh April 12, 2007Mohammed Abd El Djalil DJEHAFNo ratings yet
- 3.state Space ModelingDocument169 pages3.state Space ModelingMekonnen ShewaregaNo ratings yet
- VLSI 5 Days Class NotesDocument26 pagesVLSI 5 Days Class NotesSuresh SurveNo ratings yet
- Xpic On s340Document7 pagesXpic On s340Sloan Ian AriffNo ratings yet
- Course Name: CONTROL SYSTEM I Course Code: EE 503 Credit: 4: To Understand This Course, The Student Must Have Idea ofDocument6 pagesCourse Name: CONTROL SYSTEM I Course Code: EE 503 Credit: 4: To Understand This Course, The Student Must Have Idea ofmanish_iitrNo ratings yet
- DIGITAL SIGNAL PROCESSING Unit 6Document28 pagesDIGITAL SIGNAL PROCESSING Unit 6pramod mgNo ratings yet
- A New Methodology For Designing A Fuzzy Logic Controller and PI, PD Blending MechanismDocument14 pagesA New Methodology For Designing A Fuzzy Logic Controller and PI, PD Blending MechanismselvamNo ratings yet
- Premier University: Dept. of CSE Lab ReportDocument49 pagesPremier University: Dept. of CSE Lab Report1685Md.Shahiduzzaman BhuiyanNo ratings yet
- Lec. 2 - Metric and Normed SpacesDocument207 pagesLec. 2 - Metric and Normed Spacesessi90No ratings yet
- Notes On Gauss-Legendre QuadratureDocument5 pagesNotes On Gauss-Legendre QuadratureDENNIS KIBENo ratings yet
- Grade 3 MathDocument4 pagesGrade 3 MathHussain Imam gamingNo ratings yet
- Bio-Data (DR.P.K.sharMA) As On 13th June 2023Document34 pagesBio-Data (DR.P.K.sharMA) As On 13th June 2023Poonam Kumar SharmaNo ratings yet
- Analytical Hierarchy Process Matrix Template To Analyze Csi Per Customer Month WiseDocument49 pagesAnalytical Hierarchy Process Matrix Template To Analyze Csi Per Customer Month WiseS. Aryo NoegrohoNo ratings yet
- StudiesDocument1 pageStudiesgustav_goodstuff8176No ratings yet
- B SC Mathematics 2017 PDFDocument166 pagesB SC Mathematics 2017 PDFKtK -HelloNo ratings yet
- What Are Circular FunctionsDocument4 pagesWhat Are Circular FunctionsAnne MarielNo ratings yet
- BCH CodesDocument11 pagesBCH CodesAmol AmollNo ratings yet
- Idea Engineering Maths For Science Koriatul Jannah Siregar 4222451001Document11 pagesIdea Engineering Maths For Science Koriatul Jannah Siregar 4222451001Koriatul jannah SiregarNo ratings yet
- ASSIGNMENT PHYSICS Electrostatics 1 10 QuestionsDocument9 pagesASSIGNMENT PHYSICS Electrostatics 1 10 Questionsiqbalsingh sahaniNo ratings yet
- Magic FormulaDocument5 pagesMagic FormulaMOHAMMDBELAL100% (1)
- Problem Set 2.6: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocument9 pagesProblem Set 2.6: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Edzxcv25824066No ratings yet
- Week 1. Day 1 (Lesson1)Document9 pagesWeek 1. Day 1 (Lesson1)PatzAlzateParaguyaNo ratings yet
- Application of OMA-EMIF Algorithm To Cable Stayed Bridges: S. ChauhanDocument18 pagesApplication of OMA-EMIF Algorithm To Cable Stayed Bridges: S. ChauhanRafael Sánchez CrespoNo ratings yet
- Learning Hessian Matrix PDFDocument100 pagesLearning Hessian Matrix PDFSirajus SalekinNo ratings yet
- Hkcee Mathematics - 13.2 Coordination Geometry - Circles - P.1Document7 pagesHkcee Mathematics - 13.2 Coordination Geometry - Circles - P.1Brian LiNo ratings yet
- 8-2 Notes GeometryDocument2 pages8-2 Notes GeometryNoah BlautNo ratings yet
- Fundamentals of Data Structures - Ellis Horowitz, Sartaj SahniEllDocument542 pagesFundamentals of Data Structures - Ellis Horowitz, Sartaj SahniElljely thakkarNo ratings yet
- Branch Name B.E. Computer Science and Engineering: Semes Ter Subject Name Subject Code Exam Date SessionDocument3 pagesBranch Name B.E. Computer Science and Engineering: Semes Ter Subject Name Subject Code Exam Date SessionDinesh DineshNo ratings yet
- RPT MATH DLP YEAR 6 2023-2024 by Rozayus AcademyDocument13 pagesRPT MATH DLP YEAR 6 2023-2024 by Rozayus AcademyROSMALIZA BINTI ABDUL LATIB MoeNo ratings yet
- Steady-State Temperature in A CylinderDocument8 pagesSteady-State Temperature in A CylinderShally RahmawatyNo ratings yet
- Limits at InfinityDocument12 pagesLimits at InfinityKevin Timothy DonizaNo ratings yet
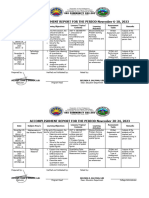
- Mike Ranada Accomplishment Report November 2023Document3 pagesMike Ranada Accomplishment Report November 2023MARICSON TEOPENo ratings yet
- A New Look at An Old EquationDocument463 pagesA New Look at An Old Equationslipstream311 -113No ratings yet
- ASM - Abstract StateMachines Theory and Applications (Lecture Notes in Computer Science) PDFDocument390 pagesASM - Abstract StateMachines Theory and Applications (Lecture Notes in Computer Science) PDFyorwuin100% (1)
- MC Question - Solution CH 05.05 Spline Method PDFDocument8 pagesMC Question - Solution CH 05.05 Spline Method PDFMaximiliano FaríaNo ratings yet
- Worksheet of Linear Equation With One VariableDocument5 pagesWorksheet of Linear Equation With One VariablekristianasillyNo ratings yet
- GROUP 1 - Bilphys18 - ElectrodynamicsDocument21 pagesGROUP 1 - Bilphys18 - ElectrodynamicsLasmaenita SiahaanNo ratings yet