You might also like
- Oil Mist Detector VN-87Document2 pagesOil Mist Detector VN-87Poma KritNo ratings yet
- Governor Test StandDocument76 pagesGovernor Test StandPj Easton100% (1)
- UG Governor Installation Manual 54042DDocument12 pagesUG Governor Installation Manual 54042DKao SophearakNo ratings yet
- I Ma 4861.03 7006 110 SN8 001 - 0 PDFDocument1,383 pagesI Ma 4861.03 7006 110 SN8 001 - 0 PDFVinicio de SouzaNo ratings yet
- Section6 Stimulation Equipment ServicesDocument24 pagesSection6 Stimulation Equipment ServicesVG100% (1)
- Airguard 3as 2005.2.15Document35 pagesAirguard 3as 2005.2.15TMZNo ratings yet
- HL-ADS compressed air dryer packagesDocument17 pagesHL-ADS compressed air dryer packagesMarcoAlbaNo ratings yet
- Presaestopa-Johnson Stuffing BoxDocument32 pagesPresaestopa-Johnson Stuffing BoxMarco SoteloNo ratings yet
- Model 3201 Liquid Level Controller: FeaturesDocument8 pagesModel 3201 Liquid Level Controller: Featuresio1_roNo ratings yet
- Dresser RandDocument4 pagesDresser RandBams ArifinNo ratings yet
- All Types of PumpDocument5 pagesAll Types of Pumphrmglobal100% (1)
- CC JEsnen Fine Filter TechnologyDocument16 pagesCC JEsnen Fine Filter Technologyg arvNo ratings yet
- Operation and Maintenance of Hydraulic Coupling Reverse Reducing Gear BoxDocument13 pagesOperation and Maintenance of Hydraulic Coupling Reverse Reducing Gear BoxCristian QuinteroNo ratings yet
- Smart ChoicesDocument32 pagesSmart ChoicesSUN RAVINo ratings yet
- Cat C280-12 Spec SheetsDocument16 pagesCat C280-12 Spec SheetsThan Htet100% (1)
- Main EngineDocument10 pagesMain EngineFe CaprichoNo ratings yet
- Emerald Driller Short Specification September2016Document2 pagesEmerald Driller Short Specification September2016Yasmin Pires RochaNo ratings yet
- Hydrodynamic or Full Fluid Film LubricationDocument59 pagesHydrodynamic or Full Fluid Film LubricationAbhishek Singh ChauhanNo ratings yet
- FPE E CatalogDocument90 pagesFPE E CatalogfabyanoNo ratings yet
- Lifeboat EnginesDocument34 pagesLifeboat EnginesAryl Alfar100% (2)
- Manual HS3400VSDDocument121 pagesManual HS3400VSDwatt_hr100% (1)
- CLE14000DPcerev9 09 PDFDocument139 pagesCLE14000DPcerev9 09 PDFAdhie WaelacxhNo ratings yet
- NEW BUILD 270FT LCT FOR SALEDocument13 pagesNEW BUILD 270FT LCT FOR SALErafetguzelsoy100% (1)
- JWS-340 Well Servicing Pump BrochureDocument4 pagesJWS-340 Well Servicing Pump BrochureCesar MoraNo ratings yet
- Ingersoll Rand FA10 Popeye Winch Air Tugger ManualDocument85 pagesIngersoll Rand FA10 Popeye Winch Air Tugger ManualAleksei ChernozhukovNo ratings yet
- Equivalent List Vecom Marine PDFDocument1 pageEquivalent List Vecom Marine PDFEurotech Tra TranNo ratings yet
- In The 6 Metre-Tonne Class It'S The Lightest and The QuickestDocument8 pagesIn The 6 Metre-Tonne Class It'S The Lightest and The QuickestAbdul Wahid ArfantoNo ratings yet
- SC 360apr-Th-M 04 28-40Document13 pagesSC 360apr-Th-M 04 28-40Ivaylo IvanovNo ratings yet
- IP Pump DataSheet CNLBDocument2 pagesIP Pump DataSheet CNLBVikk Suriya100% (1)
- Walker1 PDFDocument2 pagesWalker1 PDFDian SikumbangNo ratings yet
- 2007 Danfoss CatalogueDocument40 pages2007 Danfoss CatalogueMiroslav AleksicNo ratings yet
- ISO 8217 UpdatesDocument10 pagesISO 8217 UpdatesChemical EngNo ratings yet
- Daftar Keagenan Alat UkurDocument17 pagesDaftar Keagenan Alat Ukurprima429No ratings yet
- BADA (BADA Heavy Industries) - CatalogDocument24 pagesBADA (BADA Heavy Industries) - CatalogSholeh KhuddinNo ratings yet
- Operation & Maintenance ManualDocument21 pagesOperation & Maintenance ManualMohammed BasionyNo ratings yet
- Product Manual Wooward 03035Document10 pagesProduct Manual Wooward 03035nabilaNo ratings yet
- Idoc - Pub - Maintenance Manual For Sulzer Diesel Engines Rta76 PDFDocument412 pagesIdoc - Pub - Maintenance Manual For Sulzer Diesel Engines Rta76 PDFЮрий Климкин100% (1)
- PCT-511B Single Pump Cementing TruckDocument2 pagesPCT-511B Single Pump Cementing TruckJayesh SanganiNo ratings yet
- EMD Locomotive Spare Part List - Bitsource Solutions Pvt. LTDDocument4 pagesEMD Locomotive Spare Part List - Bitsource Solutions Pvt. LTDBitsource SolutionsNo ratings yet
- MSDS RocketDocument2 pagesMSDS Rocketbudhi saputroNo ratings yet
- Wichita PH D e 0616 PDFDocument92 pagesWichita PH D e 0616 PDFsahidNo ratings yet
- Pumpjack A PDFDocument27 pagesPumpjack A PDFMohamedShafieNo ratings yet
- Lagersmit Supreme Ventus MK2017Document33 pagesLagersmit Supreme Ventus MK2017Alexey Ivanov100% (1)
- PIM130B1 - Daihatsu DT Series Archived JUN PDFDocument5 pagesPIM130B1 - Daihatsu DT Series Archived JUN PDFAnonymous XGsiY6rNo ratings yet
- Section6 Stimulation Equipment Services HallibourtonDocument24 pagesSection6 Stimulation Equipment Services HallibourtonMaria Fernanda Bonilla SalasNo ratings yet
- HJ Designers Manual Eng 2013Document16 pagesHJ Designers Manual Eng 2013Alfredo MoralesNo ratings yet
- Composite Rig Control Air Valves CatalogueDocument40 pagesComposite Rig Control Air Valves CatalogueDarshan MakwanaNo ratings yet
- 80 BPM Calfrac Hydration Unit PDFDocument69 pages80 BPM Calfrac Hydration Unit PDFdeiiv10No ratings yet
- Ug8 L000386Document56 pagesUg8 L000386Definal Chaniago100% (2)
- Pick-Up Turbo - Jaquet Dse 1210.02 AHZDocument2 pagesPick-Up Turbo - Jaquet Dse 1210.02 AHZjuanjo100% (1)
- Allison Off Highway ProductsDocument2 pagesAllison Off Highway ProductsAnonymous JAxW7JPJ100% (1)
- Piping and Plumbing Symbols ListDocument1 pagePiping and Plumbing Symbols Listsiddarth amaravathiNo ratings yet
- Work Shop Manual DV 24Document206 pagesWork Shop Manual DV 24Tansu MavunacıNo ratings yet
- DSG DIG Installation Service and MaintenanceDocument142 pagesDSG DIG Installation Service and MaintenanceAlbert ArtellsNo ratings yet
- Auto Filter ManualDocument22 pagesAuto Filter Manualaron james empigNo ratings yet
- HEUI Hydraulic Electronically Unit InjectorDocument43 pagesHEUI Hydraulic Electronically Unit InjectorMahmoud Elsayed100% (1)
- Gas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesFrom EverandGas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesNo ratings yet
- Cruise Control, Design and FunctionDocument4 pagesCruise Control, Design and FunctionHamilton MirandaNo ratings yet
- PG Dial and Lever Governors: ApplicationsDocument4 pagesPG Dial and Lever Governors: Applicationsvishal panchalNo ratings yet
- SL00 381Document3 pagesSL00 381Subramoniam MarineNo ratings yet
- Fuel Valve: See Chapter 900-1Document14 pagesFuel Valve: See Chapter 900-1Subramoniam MarineNo ratings yet
- SL03-427 General ConditionsDocument1 pageSL03-427 General ConditionsSubramoniam MarineNo ratings yet
- Edit PDFs with Foxit PDF Editor trial versionDocument9 pagesEdit PDFs with Foxit PDF Editor trial versionSubramoniam MarineNo ratings yet
- SL2007 483Document7 pagesSL2007 483Subramoniam MarineNo ratings yet
- sl2011 544 PDFDocument4 pagessl2011 544 PDFlavkeshNo ratings yet
- SL2008 501Document3 pagesSL2008 501Subramoniam MarineNo ratings yet
- Alpha Cylinder Lubrication System ComponentsDocument23 pagesAlpha Cylinder Lubrication System ComponentsSubramoniam Marine100% (1)
- Books For OralDocument16 pagesBooks For OralSubramoniam MarineNo ratings yet
- PDFDocument1 pagePDFSubramoniam MarineNo ratings yet
- Click To Edit Master Title StyleDocument33 pagesClick To Edit Master Title StyleSubramoniam MarineNo ratings yet
- B&W Service Letters Sent To ShipDocument1 pageB&W Service Letters Sent To ShipSubramoniam MarineNo ratings yet
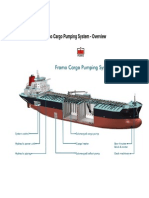
- Framo PumpsDocument2 pagesFramo PumpsSubramoniam Marine100% (1)
- Wartsila O E W 20Document2 pagesWartsila O E W 20MatthewJuppNo ratings yet
- Reed Motor CH 1 Basic PrinciplesDocument15 pagesReed Motor CH 1 Basic PrinciplesSubramoniam MarineNo ratings yet
- New 1% fuel sulphur limits for Baltic, North Sea, English ChannelDocument1 pageNew 1% fuel sulphur limits for Baltic, North Sea, English ChannelSubramoniam MarineNo ratings yet
- Sewage Treatment PlantDocument99 pagesSewage Treatment PlantSubramoniam Marine100% (4)
- Air CompressorDocument6 pagesAir CompressorSubramoniam MarineNo ratings yet
- 32 Teeth Per InchDocument1 page32 Teeth Per InchSubramoniam MarineNo ratings yet
- Brushless Alternators: © 2000 Graig PearenDocument3 pagesBrushless Alternators: © 2000 Graig PearenAboalfotoh Mahmoud100% (2)
- Portable Cargo Pump TK80 Simillar To Marflex Portable PPDocument18 pagesPortable Cargo Pump TK80 Simillar To Marflex Portable PPSubramoniam MarineNo ratings yet
- Marflex Brochure Deepwell Pumps - lr2013Document12 pagesMarflex Brochure Deepwell Pumps - lr2013Subramoniam Marine100% (1)
- A Fluorescent LampDocument2 pagesA Fluorescent LampSubramoniam MarineNo ratings yet
- Brushless Alternators: © 2000 Graig PearenDocument3 pagesBrushless Alternators: © 2000 Graig PearenAboalfotoh Mahmoud100% (2)
- CE 213 (Sec A)Document4 pagesCE 213 (Sec A)সানিNo ratings yet
- Alfa Laval Separartor p615 System DescriptionDocument14 pagesAlfa Laval Separartor p615 System DescriptionIgors VrublevskisNo ratings yet
- Lectu 14Document4 pagesLectu 14YeviraArinDiyanaNo ratings yet
- Emoving and Installing TurbochargerDocument7 pagesEmoving and Installing TurbochargerDamir MiholićNo ratings yet
- NEF Coupling Catalog English 20061201Document48 pagesNEF Coupling Catalog English 20061201Aryo WicaksonoNo ratings yet
- Technical Data For Fan Model VAX-S-710-6/20-E2: Performance - Required ActualDocument2 pagesTechnical Data For Fan Model VAX-S-710-6/20-E2: Performance - Required Actualkarim tarekNo ratings yet
- Caseih Serie 20Document1,267 pagesCaseih Serie 20Fernando Sabino100% (2)
- Forces and Motion: Basics: Not For Sale, Exclusive For Gordon College OnlyDocument5 pagesForces and Motion: Basics: Not For Sale, Exclusive For Gordon College OnlyAlyssa FrancoNo ratings yet
- ExercisesDocument13 pagesExercisesAhmed Magdy BeshrNo ratings yet
- Structural Cracks in BeamDocument2 pagesStructural Cracks in Beamswapnil gandhiNo ratings yet
- Guide to Selecting Artificial Lift for Gas WellsDocument20 pagesGuide to Selecting Artificial Lift for Gas WellsRaymundo Leonardo Pérez SierraNo ratings yet
- Fire Test Report: ANSI/API Standard 607, 6th Edition, 2010 ISO 10497: 2010Document16 pagesFire Test Report: ANSI/API Standard 607, 6th Edition, 2010 ISO 10497: 2010jamil voraNo ratings yet
- Volvo XC70 L5-2.5T ManualDocument9,721 pagesVolvo XC70 L5-2.5T Manualwllopez75% (4)
- Slip and Crystallographic TexturesDocument34 pagesSlip and Crystallographic TexturesSunkulp GoelNo ratings yet
- View thousands of Crane Specifications on FreeCraneSpecs.comDocument64 pagesView thousands of Crane Specifications on FreeCraneSpecs.comD Rider Casanova100% (1)
- PMS Series Hand Pumps PDFDocument3 pagesPMS Series Hand Pumps PDFTran DucNo ratings yet
- Mr150 MaintenanceDocument28 pagesMr150 Maintenancesh.rsrcsNo ratings yet
- Explo - Lirika OTC PDFDocument6 pagesExplo - Lirika OTC PDFMariusz PawlasNo ratings yet
- TM 5-3805-255-14 Ihc Model 100CDocument1,460 pagesTM 5-3805-255-14 Ihc Model 100CAdvocate100% (2)
- Citizen A16VI Machine SpecificationsDocument2 pagesCitizen A16VI Machine SpecificationscmganklNo ratings yet
- Parts Manual M0096787 06 (En Us) 01 ALLDocument544 pagesParts Manual M0096787 06 (En Us) 01 ALLKawasakiNo ratings yet
- Modified Asphalt Binders: Need of Present PavementsDocument85 pagesModified Asphalt Binders: Need of Present PavementsPalika ChopraNo ratings yet
- Gas Turb 10Document224 pagesGas Turb 10Mohammad Ali AkhtardaneshNo ratings yet
- Operating and Service Manual Controlled Atmosphere: Star Cool Refrigeration Unit Model SCI - XX - X - CADocument50 pagesOperating and Service Manual Controlled Atmosphere: Star Cool Refrigeration Unit Model SCI - XX - X - CAKevin GualpaNo ratings yet
- SSK DUZCE HOSPITAL CENTRAL MEDICAL GAS SUPPLY SYSTEM DESIGNDocument6 pagesSSK DUZCE HOSPITAL CENTRAL MEDICAL GAS SUPPLY SYSTEM DESIGNAhmed Abo RashedNo ratings yet
- Honda Gs390 Owners Manual (Powerwasher)Document60 pagesHonda Gs390 Owners Manual (Powerwasher)Nate SpaydNo ratings yet
- Question Bank - HMTDocument5 pagesQuestion Bank - HMTSUNDARAMAHALINGAM ANo ratings yet
- EEBDDocument8 pagesEEBDChan DanNo ratings yet
- Stress Analysis Bolted JointDocument11 pagesStress Analysis Bolted JointGustavoYippeekayyayGusNo ratings yet
- Conditionals 20.3.Document32 pagesConditionals 20.3.Stefan PetrovićNo ratings yet