You might also like
- Asas Komponen RobotikDocument54 pagesAsas Komponen Robotikwhat_t0% (1)
- J4125 - Automasi Perindustrian Dan RobotikDocument189 pagesJ4125 - Automasi Perindustrian Dan RobotikNoorlida KM67% (3)
- Mekanisme RobotikDocument30 pagesMekanisme RobotikChong Wan Yik100% (1)
- Pengawal Logik BolehaturcaraDocument7 pagesPengawal Logik BolehaturcarapnroslindaNo ratings yet
- Bab 1Document15 pagesBab 1Muhammad Zaman IbrahimNo ratings yet
- Bahagian Utama Motor DCDocument1 pageBahagian Utama Motor DCnyioqNo ratings yet
- Nota FertigasiDocument60 pagesNota Fertigasimarliana hishamNo ratings yet
- RBTS3023 Pengurusan Bengkel Dan Keselamatan Dan Kesihatan PekerjaanDocument28 pagesRBTS3023 Pengurusan Bengkel Dan Keselamatan Dan Kesihatan PekerjaanChong Wan Yik50% (2)
- Jenis-Jenis PengikatDocument4 pagesJenis-Jenis PengikatAzam SulaiNo ratings yet
- Komponen Elektronik Dan FungsinyaDocument3 pagesKomponen Elektronik Dan Fungsinyahanimery0% (1)
- Ting 2 Bab 2 ElektronikDocument1 pageTing 2 Bab 2 ElektronikNoor AfzanNo ratings yet
- Laporan Bengkel (Kayu)Document47 pagesLaporan Bengkel (Kayu)syuhaidamohamedNo ratings yet
- Electro PneumaticDocument58 pagesElectro PneumaticSiti Khadijah50% (2)
- Komponen Elektronik01Document5 pagesKomponen Elektronik01aniskuNo ratings yet
- Tatarajah Robot PerindustrianDocument2 pagesTatarajah Robot PerindustrianMasrul Nizam Mahmod100% (2)
- Peranggu Meja Cara CinaDocument17 pagesPeranggu Meja Cara CinaMohamadfadhly0% (1)
- Litar Peka Cahaya 2Document24 pagesLitar Peka Cahaya 2Izlaikha Aziz0% (1)
- Sistem KawalanDocument20 pagesSistem KawalanWenny Nguai50% (2)
- Angkup VernierDocument41 pagesAngkup VernierNorhafiza Fiza25% (4)
- 7 Cara Menanam Hidroponik RBT Thn6 050315Document3 pages7 Cara Menanam Hidroponik RBT Thn6 050315sulaiman79100% (2)
- Lukisan KeratanDocument21 pagesLukisan KeratanNgo Yee Pyng85% (13)
- Tajuk 4 TatasajianDocument37 pagesTajuk 4 TatasajianJiahuan GanNo ratings yet
- Keselamatan BengkelDocument30 pagesKeselamatan Bengkelpakkarjo100% (7)
- 1.CBT (Bahan 1 Dan 2)Document38 pages1.CBT (Bahan 1 Dan 2)Mohd Saiffuddeen Abd Aziz100% (1)
- Nama Dan Fungsi Komponen Kit ModelDocument17 pagesNama Dan Fungsi Komponen Kit Modelgvitha0% (2)
- Cahaya Tahun 4 PDFDocument4 pagesCahaya Tahun 4 PDFNurul huda Mohammad0% (1)
- Bab 2 Motor atDocument43 pagesBab 2 Motor atNor Zihan100% (1)
- Kuliah 7 Pengurusan Alatan, Bahan Dan Kewangan Yang Cekap Dan EfisenDocument53 pagesKuliah 7 Pengurusan Alatan, Bahan Dan Kewangan Yang Cekap Dan Efisenreyxp3No ratings yet
- Sistem HidraulikDocument17 pagesSistem HidraulikKhairulYaziqNo ratings yet
- Jentera Ladang - TraktorDocument35 pagesJentera Ladang - Traktormat_skyline76% (25)
- Penilaian Pengetahuan AUTO CADDocument7 pagesPenilaian Pengetahuan AUTO CADFazleen HanafiNo ratings yet
- Komponen Dan SimbolDocument3 pagesKomponen Dan SimbolLiem Tan0% (1)
- Report Amali Masakan Perancangan KerjaDocument5 pagesReport Amali Masakan Perancangan KerjafeddyNo ratings yet
- Kdri - Sample RPH RBTDocument6 pagesKdri - Sample RPH RBTAhmad Izzuddin BohriNo ratings yet
- KESIMPULANDocument1 pageKESIMPULANAnonymous 6HMTGmNo ratings yet
- Alatan TanganDocument27 pagesAlatan TanganAli Mohd100% (28)
- Organisasi Dan Pengurusan Bengkel Yang BerkesanDocument37 pagesOrganisasi Dan Pengurusan Bengkel Yang BerkesanAzzati Manap33% (3)
- Peraturan Keselamatan Bengkel/makmalDocument9 pagesPeraturan Keselamatan Bengkel/makmalrozelawati92% (13)
- GegantiDocument5 pagesGegantiAnonymous LfFFiEgR4100% (1)
- 1.0 Identify Power Eletronic Devices-Dea4232Document37 pages1.0 Identify Power Eletronic Devices-Dea4232safwanjamilNo ratings yet
- Sifat Fizikal Dan Sifat Mekanik LogamDocument10 pagesSifat Fizikal Dan Sifat Mekanik LogamFord KatimNo ratings yet
- Kertas Penerangan ETE502Document28 pagesKertas Penerangan ETE502Zunnur ZamzamNo ratings yet
- Laporan ElektrikDocument13 pagesLaporan ElektrikFaizzz Fff0% (1)
- Keselamatan MesinDocument2 pagesKeselamatan Mesinlyc924No ratings yet
- Assignment Motor AUDocument18 pagesAssignment Motor AUkasturi ridzuan83% (12)
- Projek Kereta BelonDocument2 pagesProjek Kereta BelonSiti Lorena Binti EdmundNo ratings yet
- Amali Elektrik 2Document19 pagesAmali Elektrik 2Nur AllyanaNo ratings yet
- 1-Falsafah KeselamatanDocument32 pages1-Falsafah KeselamatanSayaDiaAlNo ratings yet
- Peranan Dan Tugas Panitia Dan Setiausaha RBT DAN KHDocument6 pagesPeranan Dan Tugas Panitia Dan Setiausaha RBT DAN KHAbd Rahman IbrahimNo ratings yet
- Pengenalan PLCDocument9 pagesPengenalan PLCmustaqim100% (1)
- Lukisan Lukisan ElektrikDocument8 pagesLukisan Lukisan ElektrikAnonymous G8e4iaGNo ratings yet
- RobotDocument67 pagesRobotHisham MaznanNo ratings yet
- Asas RobotikDocument65 pagesAsas RobotikSen Joo HouNo ratings yet
- Unit 15 RobotikDocument8 pagesUnit 15 RobotikYeng Thai WongNo ratings yet
- Basicrobotic 140706213458 Phpapp02 PDFDocument39 pagesBasicrobotic 140706213458 Phpapp02 PDFHisham MaznanNo ratings yet
- Unit 15 RobotikDocument8 pagesUnit 15 RobotikaziziNo ratings yet
- Nota Ringkas Topik RobotikDocument2 pagesNota Ringkas Topik Robotikproff33No ratings yet
- Nota Ringkas Topik RobotikDocument2 pagesNota Ringkas Topik Robotikproff33No ratings yet
- Elemen-Elemen Sistem RobotikDocument41 pagesElemen-Elemen Sistem RobotikShamsul Izwan Rosli100% (1)
- Slide RobotikDocument17 pagesSlide Robotikiqbal asyraafNo ratings yet
- Rancangan Aktiviti TahunanDocument1 pageRancangan Aktiviti TahunanChong Wan YikNo ratings yet
- Kertas Kerja Benchmark Sabah TerkiniDocument14 pagesKertas Kerja Benchmark Sabah TerkiniChong Wan YikNo ratings yet
- RPH 4h Minggu 9Document8 pagesRPH 4h Minggu 9Chong Wan YikNo ratings yet
- M2-Peranan Guru Dalam Pengurusan Bilik Darjah: 2.1 Persekitaran Pembelajaran Yang Kondusif Untuk MuridDocument32 pagesM2-Peranan Guru Dalam Pengurusan Bilik Darjah: 2.1 Persekitaran Pembelajaran Yang Kondusif Untuk MuridChong Wan YikNo ratings yet
- Pembelajaran Sepanjang HayatDocument13 pagesPembelajaran Sepanjang HayatChong Wan YikNo ratings yet
- K 2 - Struktur Dan Organisasi PertubuhanDocument27 pagesK 2 - Struktur Dan Organisasi PertubuhanChong Wan YikNo ratings yet
- K 6 Disiplin Dan KerohanianDocument19 pagesK 6 Disiplin Dan KerohanianChong Wan YikNo ratings yet
- K 1 Sejarah Unit BeruniformDocument25 pagesK 1 Sejarah Unit BeruniformChong Wan YikNo ratings yet
- K 6 Disiplin Dan KerohanianDocument19 pagesK 6 Disiplin Dan KerohanianChong Wan YikNo ratings yet
- Laluan Kerjaya Guru Pembangunan Profesionalisme BerterusanDocument14 pagesLaluan Kerjaya Guru Pembangunan Profesionalisme BerterusanChong Wan YikNo ratings yet
- K 3 - Perlembangaan PertubuhanDocument33 pagesK 3 - Perlembangaan PertubuhanChong Wan YikNo ratings yet
- K 9 Asas Pertolongan CemasDocument54 pagesK 9 Asas Pertolongan CemasChong Wan YikNo ratings yet
- Istiadat Perhimpunan Kadet Remaja SekolahDocument39 pagesIstiadat Perhimpunan Kadet Remaja SekolahJin Kyong Didyme100% (1)
- ACARADocument2 pagesACARAChong Wan YikNo ratings yet
- Ajk Induk Rentas DesaDocument1 pageAjk Induk Rentas DesaChong Wan YikNo ratings yet
- Jawatankuasa KTP LatestDocument6 pagesJawatankuasa KTP LatestChong Wan YikNo ratings yet
- SDP RefleksiDocument4 pagesSDP RefleksiChong Wan Yik100% (1)
- Text MalauDocument1 pageText MalauChong Wan YikNo ratings yet
- Memo Pinjam AlatanDocument2 pagesMemo Pinjam AlatanChong Wan YikNo ratings yet
- Borang Daftar PompuanDocument2 pagesBorang Daftar PompuanChong Wan YikNo ratings yet
- Bidang Tugas Edit BaruDocument6 pagesBidang Tugas Edit BaruJennifer BakerNo ratings yet
- Pengurusan KokuDocument33 pagesPengurusan KokuChong Wan YikNo ratings yet
- Motor ElektrikDocument21 pagesMotor ElektrikChong Wan YikNo ratings yet
- Borang Daftar LakiDocument2 pagesBorang Daftar LakiChong Wan YikNo ratings yet
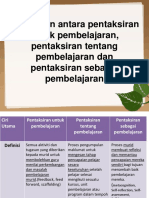
- Perbezaan Antara Pentaksiran Untuk Pembelajaran, Pentaksiran TentangDocument9 pagesPerbezaan Antara Pentaksiran Untuk Pembelajaran, Pentaksiran TentangChong Wan Yik80% (10)
- Jenis KesahanDocument2 pagesJenis KesahanChong Wan YikNo ratings yet
- Kesahan UKCGDocument3 pagesKesahan UKCGChong Wan YikNo ratings yet
- 6 Institusi Dan Sistem LatihanDocument43 pages6 Institusi Dan Sistem LatihanChong Wan YikNo ratings yet
- Fitrah Kejadian Manusia PDFDocument49 pagesFitrah Kejadian Manusia PDFmushroom511No ratings yet