You might also like
- VHDLDocument73 pagesVHDLNitesh DixitNo ratings yet
- Design and Simulation of Various Shapes of Cantilever for Piezoelectric Power GenerationDocument6 pagesDesign and Simulation of Various Shapes of Cantilever for Piezoelectric Power GenerationNitesh DixitNo ratings yet
- Design of A Cantilever BeamDocument7 pagesDesign of A Cantilever BeamLalith Leela VishnuNo ratings yet
- Maintenance of EED & de LAb Jun 2013Document2 pagesMaintenance of EED & de LAb Jun 2013Nitesh DixitNo ratings yet
- Tips for Running an Effective Laboratory SessionDocument1 pageTips for Running an Effective Laboratory SessionNitesh DixitNo ratings yet
- Couse File EDTCDocument20 pagesCouse File EDTCNitesh DixitNo ratings yet
- Bhartiya Institute of Engineering & Technology, SikarDocument3 pagesBhartiya Institute of Engineering & Technology, SikarNitesh DixitNo ratings yet
- EC1311 Communication EngineeringDocument23 pagesEC1311 Communication EngineeringVidya NeemuNo ratings yet
- Embedded Systems Assignment QuestionsDocument2 pagesEmbedded Systems Assignment QuestionsNitesh DixitNo ratings yet
- 4 G WirelessDocument23 pages4 G Wirelessterminator_palitoNo ratings yet
- BTech Electronics and Comm Syllabus Subject To Approval of ADocument33 pagesBTech Electronics and Comm Syllabus Subject To Approval of Abipin09103034No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- WCDMA Power Control Loops Minimize InterferenceDocument14 pagesWCDMA Power Control Loops Minimize InterferenceSantosh DasNo ratings yet
- Specman Elite: From Verisity Presents A High-Level Language For Writing Test EnvironmentsDocument13 pagesSpecman Elite: From Verisity Presents A High-Level Language For Writing Test EnvironmentssreejasajuNo ratings yet
- FMOD Studio Basic Functionality GuideDocument242 pagesFMOD Studio Basic Functionality GuideLaurent Ravix100% (1)
- UYSEG) University of York Science Education Group - Salters-Nuffield Advanced Biology A2 Activebook Network (Edexcel A Level Sciences) - Libgen - LiDocument22 pagesUYSEG) University of York Science Education Group - Salters-Nuffield Advanced Biology A2 Activebook Network (Edexcel A Level Sciences) - Libgen - LiAli Ali AliNo ratings yet
- Trailer ABS With PLC: Enhanced Easy-StopDocument2 pagesTrailer ABS With PLC: Enhanced Easy-StopGOOBERNo ratings yet
- SAP Security Authorization - Trace & ChecksDocument6 pagesSAP Security Authorization - Trace & ChecksJNo ratings yet
- File Sharing and Printer SharingDocument12 pagesFile Sharing and Printer SharingMC JERID C. BATUNGBAKALNo ratings yet
- List Type Approved Equipment Aug 07Document16 pagesList Type Approved Equipment Aug 07Phil TmplabNo ratings yet
- Aen1202 Introduction To Computer ApplicationsDocument5 pagesAen1202 Introduction To Computer ApplicationsAbdela Aman MtechNo ratings yet
- PostgreSQL-Audit Documentation Release 0.10.0 Installation and SQLAlchemy IntegrationDocument23 pagesPostgreSQL-Audit Documentation Release 0.10.0 Installation and SQLAlchemy IntegrationAlverix AlexielNo ratings yet
- HQL Cheat Sheet PDFDocument3 pagesHQL Cheat Sheet PDFAvik MandalNo ratings yet
- (CSE) Computer Science Engineering Multiple Choice Questions Answers PDFDocument9 pages(CSE) Computer Science Engineering Multiple Choice Questions Answers PDFHanif AnjumNo ratings yet
- Training Manual: Sap Plant Maintenance ModuleDocument62 pagesTraining Manual: Sap Plant Maintenance ModulemallinathaNo ratings yet
- Enter Mass Absence Requests Using HR_PERSON_ABSENCE_APIDocument2 pagesEnter Mass Absence Requests Using HR_PERSON_ABSENCE_APIEngOsamaHelalNo ratings yet
- Sa225s10 OhpdfDocument426 pagesSa225s10 Ohpdfvadym_kovalenko4166No ratings yet
- Overview - Modbus PLC SimulatorDocument3 pagesOverview - Modbus PLC SimulatorAnhVũNo ratings yet
- ADB Shell Command Cheat SheetDocument17 pagesADB Shell Command Cheat Sheetsunnysingh131No ratings yet
- Creating A Multiple Selection List Box in A Browser Enabled InfoPath FormDocument32 pagesCreating A Multiple Selection List Box in A Browser Enabled InfoPath FormJenniferNo ratings yet
- Roberto Alessi CV Page 1 of 4: Personal InfoDocument4 pagesRoberto Alessi CV Page 1 of 4: Personal Inforalessi61No ratings yet
- Multimedia & Animation-CCS352 - CAT-1 Questions With Answer KeysDocument12 pagesMultimedia & Animation-CCS352 - CAT-1 Questions With Answer Keysragavaharish463100% (1)
- ERP-CRM Integration Automates Business ProcessesDocument16 pagesERP-CRM Integration Automates Business ProcessesvenkatvavilalaNo ratings yet
- How To Communicate Through BLE Using FlutterDocument20 pagesHow To Communicate Through BLE Using FlutterJulioNo ratings yet
- Cost EstimationDocument20 pagesCost Estimationmecaunidos7771100% (1)
- Girmitti Software Interview QuestionsDocument2 pagesGirmitti Software Interview Questionssandeep sNo ratings yet
- SBG Administration Guide PDFDocument675 pagesSBG Administration Guide PDFLe Phuoc Hoai ChinhNo ratings yet
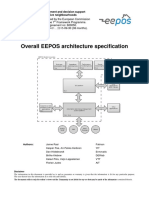
- Overall EEPOS Architecture SpecificationDocument38 pagesOverall EEPOS Architecture Specificationerkan islamovicNo ratings yet
- Accenture BPM High Performance Through Process ExcellenceDocument8 pagesAccenture BPM High Performance Through Process ExcellenceKheven Lee100% (1)
- Qy Ad Log 2023 04 09 Com - Iqiyi.i18nDocument1 pageQy Ad Log 2023 04 09 Com - Iqiyi.i18nshalza putri ramadhaniaNo ratings yet
- Software Requirements SpecificationDocument12 pagesSoftware Requirements SpecificationIshaan SharmaNo ratings yet
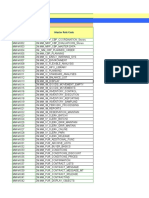
- MM Roles Master File V1.1Document225 pagesMM Roles Master File V1.1sum06No ratings yet