You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Machining Processes Used To Produce Round Shapes: Turning and Hole MakingDocument38 pagesMachining Processes Used To Produce Round Shapes: Turning and Hole MakingCh TalhaNo ratings yet
- Digi Centre Operational TechnologyDocument6 pagesDigi Centre Operational Technologymtrego94410% (2)
- Reason Key CommandsDocument6 pagesReason Key CommandsVijay KumarNo ratings yet
- OE Spec MTU16V4000DS2250 3F FC 50Hz 1 14Document6 pagesOE Spec MTU16V4000DS2250 3F FC 50Hz 1 14YasirSwatiNo ratings yet
- c02 Scrubber User ManualDocument30 pagesc02 Scrubber User ManualJomhel CalluengNo ratings yet
- Newton Laws of Motion JeopardyDocument19 pagesNewton Laws of Motion JeopardyJessiel GueribaNo ratings yet
- SG-05 Safety Guideline For Illumination at WorkplaceDocument5 pagesSG-05 Safety Guideline For Illumination at WorkplacebsrchandruNo ratings yet
- UntitledDocument107 pagesUntitledniko_seppanenNo ratings yet
- ADBCDocument12 pagesADBCJaspal KumarNo ratings yet
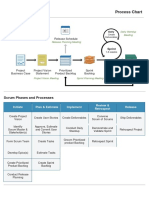
- Procesos SCRUMDocument2 pagesProcesos SCRUMRoseNo ratings yet
- Un 2 Terrazzo FlooringDocument6 pagesUn 2 Terrazzo FlooringRNo ratings yet
- ESPRIT Milling Tutorial 02Document11 pagesESPRIT Milling Tutorial 02Sandaruwan සුජීවNo ratings yet
- Single Aisle Technical Training Manual T1 (CFM 56) (LVL 2&3) LightsDocument44 pagesSingle Aisle Technical Training Manual T1 (CFM 56) (LVL 2&3) LightsarunNo ratings yet
- (INGCO) 06 November 2023 Stock ReportDocument23 pages(INGCO) 06 November 2023 Stock ReportMandiri JayaNo ratings yet
- Is 1786Document5 pagesIs 1786Jeevan ShendreNo ratings yet
- CH 19Document147 pagesCH 19Kathy YellaNo ratings yet
- Garmin Gtx327 ImDocument55 pagesGarmin Gtx327 ImHarry NuryantoNo ratings yet
- Die Casting Process & Design Gate & ParametersDocument113 pagesDie Casting Process & Design Gate & ParametersEr Tarun Patel100% (1)
- Fatwa Darul Uloom Deoband - Vol 1Document276 pagesFatwa Darul Uloom Deoband - Vol 1Ahlehaq100% (3)
- Stereo Magazine Issue 02Document66 pagesStereo Magazine Issue 02LipsticNo ratings yet
- American University of Beirut Aub Thesis TemplateDocument12 pagesAmerican University of Beirut Aub Thesis TemplateHassane EzzeddineNo ratings yet
- Material Handling System and ASRS PDFDocument13 pagesMaterial Handling System and ASRS PDFHarsh PatelNo ratings yet
- Chemistry, Intermediate II Year Model Question PapersDocument3 pagesChemistry, Intermediate II Year Model Question PapersAkshay PandeyNo ratings yet
- Odi2-065r16m18s02-Q DS 0-0-0Document3 pagesOdi2-065r16m18s02-Q DS 0-0-0leolima trustitNo ratings yet
- EVI DC Inverter Technical Manual 2 Capacity TableDocument67 pagesEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemNo ratings yet
- Pso MPPTDocument10 pagesPso MPPTDileep GNo ratings yet
- CharanDocument25 pagesCharanCharan KumarNo ratings yet
- Castrol - Iceomatic SW 68Document7 pagesCastrol - Iceomatic SW 68advantage025No ratings yet
- Clevo d900c Sager Np9260 Np9261Document100 pagesClevo d900c Sager Np9260 Np9261Doru RazvanNo ratings yet
- Didsn1811a (Skyair R-410a)Document12 pagesDidsn1811a (Skyair R-410a)Ari SetyawanNo ratings yet