You might also like
- Digital Thermometer Using 8051 Microcontroller Project ReportDocument18 pagesDigital Thermometer Using 8051 Microcontroller Project Reportjs18ps56% (9)
- Mems BookDocument473 pagesMems Bookpankaj garg100% (1)
- Meteorology Konu Konu Ayrılmış SorularDocument278 pagesMeteorology Konu Konu Ayrılmış Sorularjames100% (1)
- EEN11, Finals CombinedDocument105 pagesEEN11, Finals CombinedlavadiajhonNo ratings yet
- Een 11 Finals Lec1Document46 pagesEen 11 Finals Lec1lavadiajhonNo ratings yet
- DAC, ADC, Sensor, Interfacing DevicesDocument36 pagesDAC, ADC, Sensor, Interfacing DevicesSimranSiMmy100% (1)
- Unit 2-3Document38 pagesUnit 2-3vidhya sNo ratings yet
- Analog-To-Digital Converter (ADC) Interfacing With MicrocontrollerDocument4 pagesAnalog-To-Digital Converter (ADC) Interfacing With MicrocontrollerSridhar DineshNo ratings yet
- Rotary EncoderDocument6 pagesRotary EncoderalesysNo ratings yet
- ADC InterfacingDocument37 pagesADC InterfacingSaurav ChaudharyNo ratings yet
- Digital Thermometer Final ReportDocument22 pagesDigital Thermometer Final Reportrayedkhan100% (1)
- Adc InterfacingDocument17 pagesAdc Interfacing21ecuog059No ratings yet
- Adcanddac 210216095501Document24 pagesAdcanddac 210216095501Kiran GNo ratings yet
- Analog To DigitalDocument46 pagesAnalog To DigitalSaleem HaddadNo ratings yet
- Digital To Analog and Analog To Digital Conversion: D/A or DAC and A/D or AdcDocument50 pagesDigital To Analog and Analog To Digital Conversion: D/A or DAC and A/D or AdcsomosreeNo ratings yet
- Data Acq SystemDocument8 pagesData Acq SystemAnonymous kT0ONWNo ratings yet
- 6 Adc0804Document5 pages6 Adc0804esther_kakani919No ratings yet
- Interfacing With Analog Devices Week 12v2Document44 pagesInterfacing With Analog Devices Week 12v2Fathi Habibu RahmanNo ratings yet
- Flash Convertors Problem Question: Flash Convertors, Tracking Methods Should Be Three or Four and FindDocument7 pagesFlash Convertors Problem Question: Flash Convertors, Tracking Methods Should Be Three or Four and FindConnie ShoriwaNo ratings yet
- 4-Digital and AnalogDocument26 pages4-Digital and Analogteklaykibrom3No ratings yet
- Key Board InterfacingDocument99 pagesKey Board InterfacingNaresh Ram100% (1)
- NEC 022 External Paper SolutionDocument13 pagesNEC 022 External Paper SolutionSachin PalNo ratings yet
- Applications of 8085 Microprocessor Dac InterfaceDocument4 pagesApplications of 8085 Microprocessor Dac InterfaceSai PrakashNo ratings yet
- ADC and DACDocument4 pagesADC and DACjeniferNo ratings yet
- Dac Interface To 8051 PDFDocument4 pagesDac Interface To 8051 PDFRAVI100% (1)
- Chapter 4Document23 pagesChapter 4Tejan Kumar SharmaNo ratings yet
- Interfacing Adc 0808 To 8051 Micro ControllerDocument4 pagesInterfacing Adc 0808 To 8051 Micro Controllermatrixworld20No ratings yet
- Digital To Analog ConvertersDocument38 pagesDigital To Analog ConvertersMadhura ModiNo ratings yet
- Analog-To Digital Conversion (ADC or A/D) : 8 BitsDocument35 pagesAnalog-To Digital Conversion (ADC or A/D) : 8 BitsMANOJ MNo ratings yet
- Data ConvertersDocument20 pagesData ConvertersAbdul Razaque MagsiNo ratings yet
- Lecture 2 - ES - MH501Document16 pagesLecture 2 - ES - MH501N NandiniNo ratings yet
- ES RecordDocument39 pagesES Recordramachandran061185No ratings yet
- EE 120 - Interfacing With The Analog WorldDocument8 pagesEE 120 - Interfacing With The Analog WorldAids SumaldeNo ratings yet
- Discription of Circuit (ADC)Document6 pagesDiscription of Circuit (ADC)Rohit SoniNo ratings yet
- Presentation GaniDocument14 pagesPresentation GaniganisravaniNo ratings yet
- Ch13 ADC, DAC and Sensor InterfacingDocument33 pagesCh13 ADC, DAC and Sensor Interfacingsumbal_iqbal100% (1)
- Analog To Digital ConverterDocument4 pagesAnalog To Digital Converterzero kimochiNo ratings yet
- Interfacing HP Das (Rs-232) To Parallel Port of PC: D. Bhavsingh EC94001 M.Tech E.IDocument23 pagesInterfacing HP Das (Rs-232) To Parallel Port of PC: D. Bhavsingh EC94001 M.Tech E.Ibhavsingh_pm007No ratings yet
- Process Control in Wet Tannery: The Block Diagram of The Process Can Be Interpreted AsDocument30 pagesProcess Control in Wet Tannery: The Block Diagram of The Process Can Be Interpreted Asantex nebyuNo ratings yet
- Course Topic 2. Discrete-Time Signals and Systems (16x9)Document28 pagesCourse Topic 2. Discrete-Time Signals and Systems (16x9)Gennelyn IsraelNo ratings yet
- Block Diagram:: Device Control Using Mobile PhoneDocument12 pagesBlock Diagram:: Device Control Using Mobile PhoneNirosh KumarNo ratings yet
- Sensors and ActuatorsDocument31 pagesSensors and ActuatorsDhiraj MahajanNo ratings yet
- Using A BJT As A Switch: An Example: BelowDocument10 pagesUsing A BJT As A Switch: An Example: BelowPrakhar BhatnagarNo ratings yet
- Week 9 - Data Acquisition Systems (DAQ)Document35 pagesWeek 9 - Data Acquisition Systems (DAQ)ondoy4925No ratings yet
- Unit Iv Data Converters: Types of Analog To Digital ConvertersDocument3 pagesUnit Iv Data Converters: Types of Analog To Digital ConvertersAshrith LadiNo ratings yet
- Adc ConversionDocument20 pagesAdc Conversionhemantec100% (1)
- Analog To Digital ConversionDocument4 pagesAnalog To Digital ConversionAnkit MittalNo ratings yet
- Analog-To-Digital Conversion Btech IIIDocument50 pagesAnalog-To-Digital Conversion Btech IIILisa BhagatNo ratings yet
- An Analog To Digital ConverterDocument5 pagesAn Analog To Digital ConverterDINESH SINGHNo ratings yet
- PIC PPT 13104022 (4th Year)Document41 pagesPIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- Adc Lab Pic18Document23 pagesAdc Lab Pic18Bolarinwa Joseph100% (1)
- Data Conversion CCTSDocument5 pagesData Conversion CCTSDavis AllanNo ratings yet
- Synopsis - Temperature Measurement and ControllerDocument2 pagesSynopsis - Temperature Measurement and ControllerPreetam WalkeNo ratings yet
- Lab 4Document6 pagesLab 4izma naveedNo ratings yet
- C T I/O P: Hapter Hree RocessingDocument22 pagesC T I/O P: Hapter Hree RocessingMohamed OmarNo ratings yet
- Document On Interfacing ADC With 8051 MicrocontrollerDocument5 pagesDocument On Interfacing ADC With 8051 MicrocontrollerSrideviKumaresanNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Promotion March2016 Final Updated Upto 24-02-2016Document147 pagesPromotion March2016 Final Updated Upto 24-02-2016pankaj gargNo ratings yet
- OMR Sheet 50 Questions PDFDocument1 pageOMR Sheet 50 Questions PDFChinmoy Baruah57% (7)
- 10.electrical MaterialDocument150 pages10.electrical Materialpankaj gargNo ratings yet
- Swarm RoboticsDocument28 pagesSwarm RoboticsJitendra Kumar Dash0% (1)
- RoboswarmDocument1 pageRoboswarmpankaj gargNo ratings yet
- Wireless USBDocument30 pagesWireless USBpankaj gargNo ratings yet
- 423 Interim ReportDocument9 pages423 Interim Reportpankaj gargNo ratings yet
- Oculus SDK OverviewDocument47 pagesOculus SDK OverviewparaqueimaNo ratings yet
- ST7201-Finite Element MethodDocument14 pagesST7201-Finite Element MethodVishal RanganathanNo ratings yet
- Parts Catalog: Parts - Sales - Service - RestorationsDocument32 pagesParts Catalog: Parts - Sales - Service - RestorationsJean BelzilNo ratings yet
- Various Image Enhancement Techniques-A Critical Review: S.S. Bedi, Rati KhandelwalDocument5 pagesVarious Image Enhancement Techniques-A Critical Review: S.S. Bedi, Rati KhandelwalArina AndriesNo ratings yet
- Heat Fusion of Ice ReportDocument8 pagesHeat Fusion of Ice Reporthasifah abdazizNo ratings yet
- Quant Short Tricks PDFDocument183 pagesQuant Short Tricks PDFAarushi SaxenaNo ratings yet
- Class VI (Second Term)Document29 pagesClass VI (Second Term)Yogesh BansalNo ratings yet
- P 130881757895329843Document44 pagesP 130881757895329843Vijay MohanNo ratings yet
- Which Is The Best Solid Modelling - Dhyan AcademyDocument3 pagesWhich Is The Best Solid Modelling - Dhyan Academydhyanacademy engineersNo ratings yet
- Chap005 3Document26 pagesChap005 3Anass BNo ratings yet
- North Sails Brochure 2007 enDocument24 pagesNorth Sails Brochure 2007 ennorthsailsNo ratings yet
- Big Data Analytics & Technologies: HbaseDocument30 pagesBig Data Analytics & Technologies: HbaseWong pi wenNo ratings yet
- Simple Harmonic Oscillator: 1 HamiltonianDocument10 pagesSimple Harmonic Oscillator: 1 HamiltonianAbdurrahman imamNo ratings yet
- PPF CalculatorDocument2 pagesPPF CalculatorshashanamouliNo ratings yet
- Chapter VI DP and NetworkDocument66 pagesChapter VI DP and NetworkSirgut TesfayeNo ratings yet
- Incompressible Flow in Pipe Networks.Document7 pagesIncompressible Flow in Pipe Networks.Ayub Ali WehelieNo ratings yet
- Lab1: Access Control: Posix AclDocument7 pagesLab1: Access Control: Posix AclAla JebnounNo ratings yet
- Test Bank Chapter (4) : Choose The Correct AnswerDocument2 pagesTest Bank Chapter (4) : Choose The Correct AnswerteafNo ratings yet
- Packages in JavaDocument4 pagesPackages in JavaKummeta KeerthiNo ratings yet
- Como Desarmar Sony Vaio VGN-FE PDFDocument14 pagesComo Desarmar Sony Vaio VGN-FE PDFPeruInalambrico Redes InalambricasNo ratings yet
- Optimizing AOD Refractory PerformanceDocument10 pagesOptimizing AOD Refractory PerformanceJulio PurezaNo ratings yet
- Optimization of Decarbonization On Steel IndustryDocument28 pagesOptimization of Decarbonization On Steel Industrymsantosu000No ratings yet
- Solenoid ValveDocument76 pagesSolenoid ValveazlanNo ratings yet
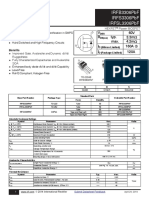
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNo ratings yet
- Relay Maintenance and Testing: BenefitsDocument2 pagesRelay Maintenance and Testing: BenefitsojoladapoNo ratings yet
- The Big TEGO. Products Services Data Sheets-75-150-16!76!31-61Document31 pagesThe Big TEGO. Products Services Data Sheets-75-150-16!76!31-61DWI RAHMASARI FATMAWATINo ratings yet
- SR-X Script Reference - EDocument24 pagesSR-X Script Reference - EDomagoj ZagoracNo ratings yet
- 16620YDocument17 pages16620YbalajivangaruNo ratings yet
- TOEC8431120DDocument522 pagesTOEC8431120Dvuitinhnhd9817No ratings yet