You might also like
- Embedded System Concepts: Introduction and Models/TITLEDocument58 pagesEmbedded System Concepts: Introduction and Models/TITLEVaishnavi BabuNo ratings yet
- Algorithm-Structured Computer Arrays and Networks: Architectures and Processes for Images, Percepts, Models, InformationFrom EverandAlgorithm-Structured Computer Arrays and Networks: Architectures and Processes for Images, Percepts, Models, InformationNo ratings yet
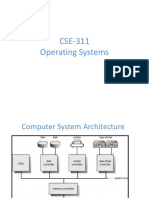
- CSE-311 Operating SystemsDocument22 pagesCSE-311 Operating Systemsbasheer usman illelaNo ratings yet
- Cluster Computing: An Overview of Key Concepts and ComponentsDocument43 pagesCluster Computing: An Overview of Key Concepts and ComponentsmanikeshNo ratings yet
- Os ArchitectureDocument28 pagesOs Architectureavinash anandNo ratings yet
- File Management & IO Services in RTOSDocument18 pagesFile Management & IO Services in RTOSjayanthimurthyNo ratings yet
- Embedded Systems: An IntroductionDocument29 pagesEmbedded Systems: An Introductionsivani05No ratings yet
- UNIX Internals: Rohit JnagalDocument36 pagesUNIX Internals: Rohit Jnagalshery_agNo ratings yet
- Embedded SystemDocument69 pagesEmbedded SystemwelliejinxNo ratings yet
- Operating System For WSN: - OS For Data Centric & Resource Constraint WSN - Category of Sensor NodeDocument20 pagesOperating System For WSN: - OS For Data Centric & Resource Constraint WSN - Category of Sensor NodechristopherNo ratings yet
- MSCS6060 Introduction to Parallel and Distributed SystemsDocument50 pagesMSCS6060 Introduction to Parallel and Distributed SystemsSadia MughalNo ratings yet
- Coffee ProjectDocument50 pagesCoffee ProjectMahmoud DaghbasNo ratings yet
- Embedded Systems Overview: - RTOS/EOS Design Concept - RTOS/EOS Case StudyDocument20 pagesEmbedded Systems Overview: - RTOS/EOS Design Concept - RTOS/EOS Case StudyosmanatamNo ratings yet
- OS StructureDocument20 pagesOS StructureLe Duc Loc (K18 HCM)No ratings yet
- 2020.04.30 - Design of UNIX - LectureDocument29 pages2020.04.30 - Design of UNIX - LectureKristijan GrozdanoskiNo ratings yet
- FlynnsDocument41 pagesFlynnsAnonymous FPMwLUw8cNo ratings yet
- OsII NotesDocument124 pagesOsII NotesAmaonwu OnyebuchiNo ratings yet
- Introduction To Computingmodule 2 ReviewerDocument3 pagesIntroduction To Computingmodule 2 ReviewerJames Anthony RosalesNo ratings yet
- Introduction to Embedded Systems Lectures 1_2Document36 pagesIntroduction to Embedded Systems Lectures 1_2Saad SaleemNo ratings yet
- Cloud Computing Technologies and ModelsDocument24 pagesCloud Computing Technologies and Modelssajithabanu banuNo ratings yet
- Embedded 1Document109 pagesEmbedded 1SHUBHANKAR SONINo ratings yet
- Embedded Operating Systems and Linux: Presented by Aaruni Giriraj Viiith Sem I.TDocument24 pagesEmbedded Operating Systems and Linux: Presented by Aaruni Giriraj Viiith Sem I.TAaruni GirirajNo ratings yet
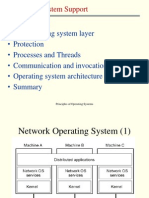
- Introduction: Operating System SupportDocument63 pagesIntroduction: Operating System SupportErmercado78No ratings yet
- Embedded System Design: Narina Thakur Bharti Vidyapeeth's College of Engineering Dept of Computer ScienceDocument45 pagesEmbedded System Design: Narina Thakur Bharti Vidyapeeth's College of Engineering Dept of Computer Sciencekartika_krazeNo ratings yet
- An Intrusion-Tolerant and Self-Recoverable Network Service System Using A Security Enhanced Chip MultiprocessorDocument18 pagesAn Intrusion-Tolerant and Self-Recoverable Network Service System Using A Security Enhanced Chip MultiprocessorlarryshiNo ratings yet
- OS Intro - Ch1Document17 pagesOS Intro - Ch1Abdul Rehman AbidNo ratings yet
- Lecture 1: Models of Distributed SystemsDocument21 pagesLecture 1: Models of Distributed SystemsVikas ThadaNo ratings yet
- OsII NotesDocument124 pagesOsII NotesSarathNo ratings yet
- Advance Operating Systems: Spring 2014Document20 pagesAdvance Operating Systems: Spring 2014Irtiqa SaleemNo ratings yet
- Real-Time Operating Systems RTOS (1)Document38 pagesReal-Time Operating Systems RTOS (1)አምላኬ አባቴNo ratings yet
- Mychaela Falconia (She/her) 760-787-0545: Core Skill AreasDocument5 pagesMychaela Falconia (She/her) 760-787-0545: Core Skill AreasKritika ShuklaNo ratings yet
- Operating SystemDocument29 pagesOperating SystemdMAX GamingNo ratings yet
- Mychaela Falconia (She/her) 760 787 0545: Core Skill AreasDocument6 pagesMychaela Falconia (She/her) 760 787 0545: Core Skill AreasKritika ShuklaNo ratings yet
- Desktop and Server OS VulnerabilitiesDocument69 pagesDesktop and Server OS VulnerabilitiescoderNo ratings yet
- 3-Overview of Embedded Systems-05!01!2024Document107 pages3-Overview of Embedded Systems-05!01!2024kx.graphyNo ratings yet
- RTOS SchedulingDocument21 pagesRTOS SchedulingratnadeepbimtacNo ratings yet
- Operating 12system OriDocument102 pagesOperating 12system Oriapi-3716254No ratings yet
- CSC204 - Chapter 1.1Document25 pagesCSC204 - Chapter 1.1Danish DanielNo ratings yet
- 2.operating System Structures wKlQ5ifo7P PDFDocument43 pages2.operating System Structures wKlQ5ifo7P PDFShivam mishraNo ratings yet
- Os MD 1Document137 pagesOs MD 1sivakrishna_munagaNo ratings yet
- ACA Mod1Document118 pagesACA Mod1avi003No ratings yet
- Windows Kernel Internals II: University of Tokyo - July 2004Document16 pagesWindows Kernel Internals II: University of Tokyo - July 2004Randall Jordan MoreiraNo ratings yet
- Chapter 1 - IntroductionDocument31 pagesChapter 1 - IntroductionHuzaifa AhmedNo ratings yet
- CH 8Document67 pagesCH 8ÇHTØUKÎ RËBÉLSSNo ratings yet
- Sun Solaris OS: Glenn Barney Gb2174@columbia - EduDocument35 pagesSun Solaris OS: Glenn Barney Gb2174@columbia - EduhanhndNo ratings yet
- Real Time OS PresentationDocument15 pagesReal Time OS PresentationSaro VrsNo ratings yet
- Unit IV Cluster ComputingDocument70 pagesUnit IV Cluster ComputingPrathameshNo ratings yet
- Operating System ServicesDocument23 pagesOperating System ServicesdMAX GamingNo ratings yet
- Week 6 ADocument32 pagesWeek 6 Ahussmalik69No ratings yet
- Lecture 5Document31 pagesLecture 5Dr. Muhammad RazaNo ratings yet
- Introduction to Embedded SystemsDocument17 pagesIntroduction to Embedded Systemsyenninh86No ratings yet
- CSC204 - Chapter 1.1Document25 pagesCSC204 - Chapter 1.1AISYAH FARHANANo ratings yet
- Linux System ArchitectureDocument15 pagesLinux System ArchitectureANIMESH MOHAPATRANo ratings yet
- 3 Design Challenges, 05-01-2024Document74 pages3 Design Challenges, 05-01-2024kx.graphyNo ratings yet
- Chapter 2: Operating-System Structures: - Operating System Design - Interface Provided To Users & ProgrammersDocument31 pagesChapter 2: Operating-System Structures: - Operating System Design - Interface Provided To Users & ProgrammersShierly MacarubboNo ratings yet
- System Structure PDFDocument23 pagesSystem Structure PDFh4nnrtmNo ratings yet
- CS542: Topics in Distributed SystemsDocument39 pagesCS542: Topics in Distributed SystemsyekoyesewNo ratings yet
- CH 4 - Rtos 1Document41 pagesCH 4 - Rtos 1tanvikolwalkarNo ratings yet
- IFA - 307 - Introduction To Distributed Computing - Lec2Document19 pagesIFA - 307 - Introduction To Distributed Computing - Lec2Fikri HaekalNo ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- REF Prayog51 MannualDocument42 pagesREF Prayog51 Mannualapi-3726520No ratings yet
- Lecture 2 C ProgrammingDocument14 pagesLecture 2 C Programmingapi-3726520100% (2)
- C51 PrimerDocument190 pagesC51 PrimerQuan ThanhNo ratings yet
- IDE51Document116 pagesIDE51api-3726520No ratings yet
- Writing C Code For The 8051Document52 pagesWriting C Code For The 8051BHUSHANNo ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- TR51Document68 pagesTR51api-3726520No ratings yet
- Philips P89C51RD2 6Document52 pagesPhilips P89C51RD2 6api-3726520No ratings yet
- Prayog51 MannualDocument43 pagesPrayog51 Mannualapi-3726520100% (1)
- I2C BusDocument126 pagesI2C Busapi-3726520100% (2)
- IDE51Document116 pagesIDE51api-3726520No ratings yet
- C51Document393 pagesC51api-3726520100% (1)
- GMCS 51RD2 Interfacing TechniquesDocument55 pagesGMCS 51RD2 Interfacing Techniquesapi-3726520No ratings yet
- 24C512Document20 pages24C512pravinrautrautNo ratings yet
- Gs51 Keil IntroDocument230 pagesGs51 Keil IntroMindfield MiNo ratings yet
- 24C512Document20 pages24C512pravinrautrautNo ratings yet
- The 8051 Assembly LanguageDocument82 pagesThe 8051 Assembly Languageapi-3726520100% (1)
- Archi 8051Document31 pagesArchi 8051api-3726520No ratings yet
- Complete RefDocument424 pagesComplete Refapi-3726520No ratings yet
- 1933BDocument14 pages1933Bapi-3726520No ratings yet
- C51Document393 pagesC51api-3726520100% (1)
- A 51Document415 pagesA 51api-3726520No ratings yet
- Placement GuideDocument457 pagesPlacement Guideapi-3760682No ratings yet
- AT24C512 2tpDocument4 pagesAT24C512 2tpapi-3726520No ratings yet
- 8051Document24 pages8051api-3726520100% (1)
- JVMDocument6 pagesJVMapi-3738830No ratings yet
- MVMWhite PaperDocument9 pagesMVMWhite Paperapi-3726520No ratings yet
- How Materials Decay Over TimeDocument14 pagesHow Materials Decay Over TimeMenchie Domingo90% (10)
- The House: Rooms and Objects: Unit 2Document6 pagesThe House: Rooms and Objects: Unit 2Adriana Flores apazaNo ratings yet
- 16 - Analysis of StructuresDocument18 pages16 - Analysis of StructuresIamellahollic KathportsNo ratings yet
- World Economic Forum BSBDocument7 pagesWorld Economic Forum BSBErlangga Rizqi FitriansyahNo ratings yet
- Cubism Study SheetDocument4 pagesCubism Study Sheetapi-252776499No ratings yet
- Essam Amr - Civil Engineer CV4 PDFDocument2 pagesEssam Amr - Civil Engineer CV4 PDFAnonymous MYWXjWVp9uNo ratings yet
- BRKSEC-2021 Firewall ArchitectureDocument74 pagesBRKSEC-2021 Firewall ArchitectureJesus RosalesNo ratings yet
- Jadual Kelas Kafa Tahap 1 2021Document9 pagesJadual Kelas Kafa Tahap 1 2021Wira B. RamliNo ratings yet
- Calculation For 1.4m X 1.5m RCC Box CulvertDocument12 pagesCalculation For 1.4m X 1.5m RCC Box CulvertK Srinivasa RaoNo ratings yet
- HVAC Approved Manufacturers ListDocument2 pagesHVAC Approved Manufacturers ListJoshuaNo ratings yet
- Design For RC Flat SlabsDocument70 pagesDesign For RC Flat SlabsAil AafaaqNo ratings yet
- LRFD Bridge Design Manual-MDOT PDFDocument747 pagesLRFD Bridge Design Manual-MDOT PDFJuan Pablo Leniz LoaizaNo ratings yet
- Ds ChecklistDocument2 pagesDs ChecklistG-SamNo ratings yet
- Anchor Bolt RequirementsDocument15 pagesAnchor Bolt RequirementsshaimenneNo ratings yet
- Two-Way Slabs: by Dr. Salah UddinDocument48 pagesTwo-Way Slabs: by Dr. Salah UddinZohaibShoukatBalochNo ratings yet
- Yasir Hayat Geo Engineer CVDocument5 pagesYasir Hayat Geo Engineer CVYasir HayatNo ratings yet
- Lesson 7: The Eras of Art and Music: ObjectivesDocument8 pagesLesson 7: The Eras of Art and Music: ObjectivesAsteria TimeNo ratings yet
- Sha M.tech ResumeDocument3 pagesSha M.tech ResumesashareefNo ratings yet
- CV RinfDocument9 pagesCV RinfkorsairNo ratings yet
- Monopole TowersDocument3 pagesMonopole TowersAbdallah Irfaan RamjanNo ratings yet
- Pre Insulated Piping Sytem HDPEDocument15 pagesPre Insulated Piping Sytem HDPEVincent SablanNo ratings yet
- Woodworks Design Example - Four-Story Wood-Frame Structure Over Podium SlabDocument52 pagesWoodworks Design Example - Four-Story Wood-Frame Structure Over Podium Slabcancery0707No ratings yet
- BricksDocument94 pagesBricksCool 198No ratings yet
- Pseudo Wire ShortDocument56 pagesPseudo Wire ShortkanfouchNo ratings yet
- Read The Email and Answer The Questions.: 1 Last Year The Friends Stayed in ADocument4 pagesRead The Email and Answer The Questions.: 1 Last Year The Friends Stayed in ASvetlana Toma0% (1)
- Sitecom WL 183 Full ManualDocument60 pagesSitecom WL 183 Full ManualHipolito LopesNo ratings yet
- Water Tank PlanDocument1 pageWater Tank PlanHussain GhaziNo ratings yet
- 02SOP-Outlook AndroidDocument8 pages02SOP-Outlook Androidarchana kinikarNo ratings yet
- Calculate Perimeters and Lengths for Word ProblemsDocument3 pagesCalculate Perimeters and Lengths for Word ProblemsAarti PadiaNo ratings yet
- Cygwin/Bash Command Reference: File Commands System InfoDocument1 pageCygwin/Bash Command Reference: File Commands System InfoPavankumar KaredlaNo ratings yet