You might also like
- uCOS II Reference ManualDocument89 pagesuCOS II Reference ManualKien Nguyen TrungNo ratings yet
- Overview of UcosiiDocument78 pagesOverview of UcosiigafoorkadostNo ratings yet
- UC Mutual Exclusion SemaphoreDocument27 pagesUC Mutual Exclusion SemaphoreAbhishek SinghNo ratings yet
- Queue FunctionsDocument4 pagesQueue FunctionspiyushpandeyNo ratings yet
- C/OS-II: V2.51 Quick Reference ChartDocument1 pageC/OS-II: V2.51 Quick Reference ChartAljaž SrebrničNo ratings yet
- How To Get A C/OS-II Application Running: Default ConfigurationDocument7 pagesHow To Get A C/OS-II Application Running: Default ConfigurationdinismiguelNo ratings yet
- Inter-Task Communication Using Message Queue: Ex - No.8 DateDocument10 pagesInter-Task Communication Using Message Queue: Ex - No.8 DateDheereshNo ratings yet
- Implemention of Mailbox Function Using LPC2378Document5 pagesImplemention of Mailbox Function Using LPC2378imbharteshNo ratings yet
- Lab 5Document11 pagesLab 5Navid MohagheghNo ratings yet
- Μc/Os Ii The Real-Time KernelDocument21 pagesΜc/Os Ii The Real-Time KernelVigneshwaran SdNo ratings yet
- Implemention of Mutex Function Using Lpc2378Document6 pagesImplemention of Mutex Function Using Lpc2378imbharteshNo ratings yet
- Microc/Os-Ii Kernel Structure-IiiDocument38 pagesMicroc/Os-Ii Kernel Structure-IiiNaman KhatriNo ratings yet
- Chapter 03Document78 pagesChapter 03Lê Đình TiếnNo ratings yet
- Implemention of Message Queue Using LPC2148Document5 pagesImplemention of Message Queue Using LPC2148imbharteshNo ratings yet
- uC/OS-II Event FlagsDocument32 pagesuC/OS-II Event FlagsEthan LauNo ratings yet
- Ucos Ii: BY: MeetDocument26 pagesUcos Ii: BY: MeetmeetbshahNo ratings yet
- 8th ExpDocument12 pages8th ExpusaravanakumarNo ratings yet
- EmbeddedSys Nri Unit-VIIDocument36 pagesEmbeddedSys Nri Unit-VIIMurali KrishnaNo ratings yet
- Microc/Os-Ii Quick Reference: Index of ServicesDocument29 pagesMicroc/Os-Ii Quick Reference: Index of ServicesEmran PrevostNo ratings yet
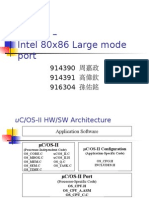
- Micro c/Os II 作業系統Document31 pagesMicro c/Os II 作業系統陳鍾誠No ratings yet
- CVE 2017 11176 A Step by Step Linux Kernel Exploitation Part 2Document32 pagesCVE 2017 11176 A Step by Step Linux Kernel Exploitation Part 2Lincoln DiasNo ratings yet
- C/OS-II Reference Manual: #DefineDocument128 pagesC/OS-II Reference Manual: #DefineVramesh4545No ratings yet
- Chapter2.4-Syn Pro - Question - 20Document6 pagesChapter2.4-Syn Pro - Question - 20vinhphatst1235No ratings yet
- Lab FreeRTOSDocument11 pagesLab FreeRTOSImmortal WizardNo ratings yet
- Ucos II RefmanDocument159 pagesUcos II RefmanAhmed AbdelhakemNo ratings yet
- Implemention of Mailbox Function Using LPC2148Document5 pagesImplemention of Mailbox Function Using LPC2148imbharteshNo ratings yet
- Your Electronics Open Source: FIFO QueueDocument6 pagesYour Electronics Open Source: FIFO QueueIonela100% (2)
- C303.Chương4 TH9Document3 pagesC303.Chương4 TH9Trần Ngọc PhongNo ratings yet
- The Myth of QiLinDocument22 pagesThe Myth of QiLinFakermanNo ratings yet
- Implemention of Message Queue Using LPC2378Document9 pagesImplemention of Message Queue Using LPC2378imbharteshNo ratings yet
- Implementing and Maintaining Your User Entry Point Table UeptDocument8 pagesImplementing and Maintaining Your User Entry Point Table Ueptrachmat99No ratings yet
- Mod UcosDocument76 pagesMod Ucosapi-27122486100% (2)
- Porting - Intel 80x86 Large Mode PortDocument30 pagesPorting - Intel 80x86 Large Mode PortSuhas ShirolNo ratings yet
- Chap 20Document32 pagesChap 20Udasi DeviNo ratings yet
- Recon 2012 Skochinsky Compiler InternalsDocument54 pagesRecon 2012 Skochinsky Compiler InternalsimoptraNo ratings yet
- Eu 16 Shen Rooting Every Android From Extension To ExploitationDocument43 pagesEu 16 Shen Rooting Every Android From Extension To Exploitationyelawib563No ratings yet
- Team17 HiddenCommandsDocument9 pagesTeam17 HiddenCommandsasdfqewvgresvgNo ratings yet
- JB iOSDocument27 pagesJB iOSKellerman RiveroNo ratings yet
- Chapter 13Document56 pagesChapter 13Lê Đình TiếnNo ratings yet
- Real-Time Kernel DocumentationDocument7 pagesReal-Time Kernel Documentationharoon_niazNo ratings yet
- Esd AssignmentDocument11 pagesEsd AssignmentSNOWFLAKE STUDIONo ratings yet
- Threads With Ucontext - Implementation ChatgptDocument8 pagesThreads With Ucontext - Implementation ChatgptAlfred YimNo ratings yet
- ZenerDocument13 pagesZenerapi-531846547No ratings yet
- Qcom Omx Plugin: Function Internal Function Calls DescriptionDocument2 pagesQcom Omx Plugin: Function Internal Function Calls DescriptionSai AkulaNo ratings yet
- Main CDocument10 pagesMain CTarcísio Souza de MeloNo ratings yet
- Introduction To Freertos: What Is An Rtos?Document15 pagesIntroduction To Freertos: What Is An Rtos?عبدالله بحراويNo ratings yet
- SpihsmDocument26 pagesSpihsmapi-438120791No ratings yet
- ACPI Implants Ruxmon PresentationDocument49 pagesACPI Implants Ruxmon PresentationVIC RODNo ratings yet
- Introduction To FreeRTOSDocument75 pagesIntroduction To FreeRTOSឆាម វ៉ាន់នូវNo ratings yet
- Jes2 Checkpoint & The Coupling Facility: Function Type Structure Name SIZEDocument5 pagesJes2 Checkpoint & The Coupling Facility: Function Type Structure Name SIZEÖzgür HepsağNo ratings yet
- The Art of Bootkit DevelopmentDocument26 pagesThe Art of Bootkit DevelopmentKleissnerNo ratings yet
- CodeDocument3 pagesCodeSteve DicksonNo ratings yet
- Phrack Issue 68 #1Document46 pagesPhrack Issue 68 #1Rishab ChoubeyNo ratings yet
- VxWorks - Get StartedDocument13 pagesVxWorks - Get StartedRps Deepan100% (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Interview Questions for IBM Mainframe DevelopersFrom EverandInterview Questions for IBM Mainframe DevelopersRating: 1 out of 5 stars1/5 (1)
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12From EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12No ratings yet
- Dreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9From EverandDreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9No ratings yet
- RttiDocument14 pagesRttiapi-3765806No ratings yet
- Day 1 SlidesDocument49 pagesDay 1 Slidesapi-3765806No ratings yet
- LPC 2106Document17 pagesLPC 2106api-3765806No ratings yet
- ArmDocument39 pagesArmapi-3765806100% (1)
- BluetoothDocument32 pagesBluetoothapi-3765806100% (1)
- Data Replication in A Mobile EnvironmentDocument29 pagesData Replication in A Mobile Environmentapi-3765806100% (1)
- Schiller Slides Distributed SystemsDocument196 pagesSchiller Slides Distributed Systemsapi-3765806100% (4)
- Question Bank For First IA TestDocument1 pageQuestion Bank For First IA Testmanikandan trNo ratings yet
- VT525 SpecDocument2 pagesVT525 SpecTeo ZeniosNo ratings yet
- 655N118 FDI Test Tool LED Status For Color C75 Press v2Document1 page655N118 FDI Test Tool LED Status For Color C75 Press v2paulo michaelNo ratings yet
- Com - Lab. Orientation-ProgramDocument6 pagesCom - Lab. Orientation-ProgramRegina Minguez SabanalNo ratings yet
- Carbide Series: Mid-Tower Gaming CaseDocument48 pagesCarbide Series: Mid-Tower Gaming CaseRoger SantosNo ratings yet
- COA GTU Study Material Presentations Unit-2 15012020080815AMDocument65 pagesCOA GTU Study Material Presentations Unit-2 15012020080815AMJanvi PatelNo ratings yet
- PS2 Keyboard and Mouse Mini-DIN-6 Connector PinoutsDocument2 pagesPS2 Keyboard and Mouse Mini-DIN-6 Connector Pinoutsapi-3721578No ratings yet
- Lecture 1 - Programming With VBDocument30 pagesLecture 1 - Programming With VBSimon Osabo Asamoah100% (2)
- Unit 3 OF ESDDocument22 pagesUnit 3 OF ESDTanveer ShariffNo ratings yet
- Programming The 8051/8052Document33 pagesProgramming The 8051/8052vali29No ratings yet
- Ali RasheedDocument100 pagesAli Rasheedali,r98No ratings yet
- Debugging Win32 Code - Troubleshooting Beneath The AbstractionsDocument76 pagesDebugging Win32 Code - Troubleshooting Beneath The AbstractionsShreen ThomasNo ratings yet
- 3.3.5 RISC Processors, 3.3.6 Paralell ProcessiDocument12 pages3.3.5 RISC Processors, 3.3.6 Paralell ProcessijohnNo ratings yet
- Dell Inspiron 6400 SchematicsDocument45 pagesDell Inspiron 6400 SchematicsWilgen GarciaNo ratings yet
- Mikromedia Dspic33 Manual v110cDocument44 pagesMikromedia Dspic33 Manual v110cMohamed NourNo ratings yet
- Computer HardwareDocument13 pagesComputer HardwareChandrashekar GoskeNo ratings yet
- A 1250401Document102 pagesA 1250401sinai61100% (1)
- COMPUTE!'s Third Book of AtariDocument321 pagesCOMPUTE!'s Third Book of Atariremow100% (5)
- Probe Tips For CodeWarrior TAPDocument1 pageProbe Tips For CodeWarrior TAPm3y54mNo ratings yet
- Flashcatusb: For ProfessionalsDocument35 pagesFlashcatusb: For ProfessionalssamuelRODNo ratings yet
- CSCI 510: Computer Architecture Written Assignment 2 SolutionsDocument6 pagesCSCI 510: Computer Architecture Written Assignment 2 Solutionss_subbulakshmiNo ratings yet
- Module II: History of Electronics: Unit 1: Pre-Mechanical Age (3000 B.C. - 1450 A.D.)Document6 pagesModule II: History of Electronics: Unit 1: Pre-Mechanical Age (3000 B.C. - 1450 A.D.)Jenny PillocNo ratings yet
- Module - 1Document41 pagesModule - 1ManjuanthNo ratings yet
- MSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionDocument59 pagesMSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: Descriptionflo72afNo ratings yet
- Motherboard Manual Ga-7zxe eDocument84 pagesMotherboard Manual Ga-7zxe eericfp3No ratings yet
- Maintenance and Service GuideDocument122 pagesMaintenance and Service GuideRusLanCkNo ratings yet
- HKCEE CIT 1999 Paper 1 MarkingDocument2 pagesHKCEE CIT 1999 Paper 1 MarkingEric ChiuNo ratings yet
- Lenovo Z370 Specs PDFDocument1 pageLenovo Z370 Specs PDFjohnrey_lidresNo ratings yet
- Lecture 3Document29 pagesLecture 3Muhammad NoumanNo ratings yet
- HW 1 Muhammad Farhan HaniftyajiDocument3 pagesHW 1 Muhammad Farhan HaniftyajiMuhammad FarhanNo ratings yet