You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Three Tier Client-ServerDocument5 pagesThree Tier Client-ServerIsaiah NgareNo ratings yet
- Development of Smart Home Automation System Based On PLCDocument6 pagesDevelopment of Smart Home Automation System Based On PLCswathisreejith6No ratings yet
- Hacking LED Garden Lights to Learn ElectronicsDocument7 pagesHacking LED Garden Lights to Learn ElectronicsRobert CristobalNo ratings yet
- Enterprises Java BeansDocument13 pagesEnterprises Java BeansArif MohmmadNo ratings yet
- DFN30053: Differences between OSS and CSSDocument6 pagesDFN30053: Differences between OSS and CSSPREEVITHANo ratings yet
- Microprocessor History: From Simple 8-Bit Designs to Modern 64-Bit CPUsDocument16 pagesMicroprocessor History: From Simple 8-Bit Designs to Modern 64-Bit CPUsSaifuddin KhanNo ratings yet
- FM Demodulator Circuit ExperimentDocument8 pagesFM Demodulator Circuit ExperimentBruno CastroNo ratings yet
- Sanmina Corporation: Product Design and DevelopmentDocument3 pagesSanmina Corporation: Product Design and DevelopmentJoseph KymmNo ratings yet
- MSDN Magazine February 2011Document158 pagesMSDN Magazine February 2011ChiTownITNo ratings yet
- L4 EaDocument7 pagesL4 EaIoanaNicoletaNo ratings yet
- Panasonic Th-L47et5d Chassis La35 Led TVDocument75 pagesPanasonic Th-L47et5d Chassis La35 Led TVsunny100% (1)
- Install Guide: Convergence of Power & IntelligenceDocument4 pagesInstall Guide: Convergence of Power & IntelligenceYassin AlkadyNo ratings yet
- Compare Hadoop vs. Spark vs. Kafka For Your Big Data StrategyDocument10 pagesCompare Hadoop vs. Spark vs. Kafka For Your Big Data StrategyusmanNo ratings yet
- Atr 600 VHF Communications Transceiver: Phone: 1-877-4-SPRUCE - International: +951-372-9555Document4 pagesAtr 600 VHF Communications Transceiver: Phone: 1-877-4-SPRUCE - International: +951-372-9555danielNo ratings yet
- Sinr Pucch Pusch SrsDocument31 pagesSinr Pucch Pusch SrsJr MgNo ratings yet
- 9619 Sanyo LCD-32XH4 Chassis UH2-L Manual de ServicioDocument49 pages9619 Sanyo LCD-32XH4 Chassis UH2-L Manual de Serviciohectormv22100% (1)
- PCBA MachineDocument62 pagesPCBA MachineSahara MalabananNo ratings yet
- FSM-ES (001-924) Fire System Monitor + Engine ShutdownDocument7 pagesFSM-ES (001-924) Fire System Monitor + Engine ShutdownYoga putra riandiNo ratings yet
- Applications: Unit - ViDocument30 pagesApplications: Unit - ViRavi TejaNo ratings yet
- AWS Security Groups, NACLs, Azure NSGs & Firewall RulesDocument45 pagesAWS Security Groups, NACLs, Azure NSGs & Firewall RulesWael HAMDINo ratings yet
- FIR Ece2610 Chap5Document38 pagesFIR Ece2610 Chap5bongo77priestNo ratings yet
- CB4618 Installation ManualDocument16 pagesCB4618 Installation Manualjone hurbNo ratings yet
- CH04-COA10e Cache MemoryDocument46 pagesCH04-COA10e Cache MemoryGet InsightNo ratings yet
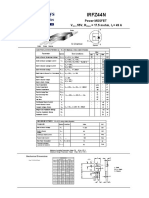
- IRFZ44N Power MOSFETDocument1 pageIRFZ44N Power MOSFETFherdzy AnNo ratings yet
- AWS Industrial Predictive Maintenance: Machine Learning Model and Anomaly Detection Reference ArchitectureDocument1 pageAWS Industrial Predictive Maintenance: Machine Learning Model and Anomaly Detection Reference ArchitectureteragoNo ratings yet
- UNIT-III BJT, FET (Completed) PDFDocument35 pagesUNIT-III BJT, FET (Completed) PDFRachananjali Kunamneni Kethineni100% (1)
- TECHNICAL BULLETIN ECOSYS M3145idn/M3645idn: SubjectDocument19 pagesTECHNICAL BULLETIN ECOSYS M3145idn/M3645idn: SubjectItachi CampoNo ratings yet
- Samsung WF106U4SAWQ - AZ Com DiagramaDocument54 pagesSamsung WF106U4SAWQ - AZ Com DiagramaJose Airton Tirakowski100% (2)
- Crowbar Prot 1Document11 pagesCrowbar Prot 1kuchowNo ratings yet
- MIDI Keyboard Manual: MIDIPLUS ORIGIN 37Document21 pagesMIDI Keyboard Manual: MIDIPLUS ORIGIN 37David100% (1)