You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Embedded Systems WikiDocument123 pagesEmbedded Systems WikiYogendrabhilash0% (1)
- Bigger Than A Monster Truck PDFDocument9 pagesBigger Than A Monster Truck PDFsnikneshNo ratings yet
- Noise in The NightDocument10 pagesNoise in The NightsnikneshNo ratings yet
- Ancient Egypt PDFDocument8 pagesAncient Egypt PDFsnikneshNo ratings yet
- Introduction To LTE Device TestingDocument76 pagesIntroduction To LTE Device TestingAdnan Dizdar100% (1)
- Robust Adaptive Transmission PottieDocument13 pagesRobust Adaptive Transmission PottiesnikneshNo ratings yet
- B122LnotesBV PDFDocument37 pagesB122LnotesBV PDFryanNo ratings yet
- An Introduction To Turbo Equalization: Ian MarslandDocument36 pagesAn Introduction To Turbo Equalization: Ian MarslandhahutNo ratings yet
- Cdma Lte SWPDocument15 pagesCdma Lte SWPsnikneshNo ratings yet
- Tutorial On WIFI Link BudgetsDocument6 pagesTutorial On WIFI Link BudgetssnikneshNo ratings yet
- SMS4DC Am TM 3Document19 pagesSMS4DC Am TM 3sniknesh0% (1)
- bstj58 5 1073Document28 pagesbstj58 5 1073snikneshNo ratings yet
- Design of Digital FiltersDocument24 pagesDesign of Digital FiltersDenise NelsonNo ratings yet
- Microwave Link DesignDocument69 pagesMicrowave Link DesignsnikneshNo ratings yet
- Radiowave PropagationDocument94 pagesRadiowave Propagationala_a_silawi100% (8)
- Umts HsdpaDocument40 pagesUmts HsdpaabdullaaNo ratings yet
- To Convolutional Codes: ExampleDocument18 pagesTo Convolutional Codes: ExampleFatima AhsanNo ratings yet
- Receiver Sensitivity / NoiseDocument9 pagesReceiver Sensitivity / NoiseThiyagu MohanNo ratings yet
- C80216m-08 323r1Document7 pagesC80216m-08 323r1snikneshNo ratings yet
- LTE Backhaul Requirements - A Reality Check - Feb 2011Document6 pagesLTE Backhaul Requirements - A Reality Check - Feb 2011bardarisNo ratings yet
- Lte2012 WPDocument32 pagesLte2012 WPjbond07No ratings yet
- LTE Data Rate Calculation?: Best AnswerDocument1 pageLTE Data Rate Calculation?: Best AnswersnikneshNo ratings yet
- Self-Cancellation of Sample Frequency Offset in OFDM Systems inDocument5 pagesSelf-Cancellation of Sample Frequency Offset in OFDM Systems insnikneshNo ratings yet
- Ee422 9Document43 pagesEe422 9snikneshNo ratings yet
- Passive Intermodulation Distortion in Connectors, Cable and Cable AssembliesDocument9 pagesPassive Intermodulation Distortion in Connectors, Cable and Cable AssembliessnikneshNo ratings yet
- The Importance of In-Building Solutions inDocument8 pagesThe Importance of In-Building Solutions insnikneshNo ratings yet
- Design and Planning of WiMAX NetworksDocument44 pagesDesign and Planning of WiMAX NetworksThong DucNo ratings yet
- Wimax Lte PlanningDocument37 pagesWimax Lte PlanningsnikneshNo ratings yet
- WB 802.11n Position PaperDocument7 pagesWB 802.11n Position PaperAdvantec SrlNo ratings yet
- LteDocument48 pagesLtepathlossanwar100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Toshiba Qosmio F40Document78 pagesToshiba Qosmio F40jose peresNo ratings yet
- (GUIDE) Moto G - Restore Stock FirmwareDocument3 pages(GUIDE) Moto G - Restore Stock FirmwareDaniel Esau Rivera AyalaNo ratings yet
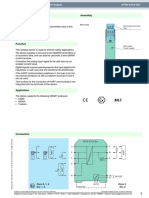
- Kfd2-Stc4-Ex1 P & F BarrierDocument3 pagesKfd2-Stc4-Ex1 P & F Barrierbeig0% (1)
- A Very Useful Timed Beeper Circuit SchematicDocument2 pagesA Very Useful Timed Beeper Circuit Schematictim schroderNo ratings yet
- Code For Wap SecurityDocument4 pagesCode For Wap SecurityfirepaniNo ratings yet
- Instrumentation (Finale)Document20 pagesInstrumentation (Finale)Jonathan BacusNo ratings yet
- SLAMTEC General Purpose Robot Platform Charging Station User ManualDocument7 pagesSLAMTEC General Purpose Robot Platform Charging Station User ManualFarid ZaiemNo ratings yet
- E2 Lab 11 6 3Document10 pagesE2 Lab 11 6 3Ninja NuggetNo ratings yet
- RISC-V Core RISC-V CoreDocument3 pagesRISC-V Core RISC-V CoreRajini KasalaNo ratings yet
- Hotel Management SystemDocument67 pagesHotel Management SystemSuresh Prabhu63% (8)
- Sticky Notes 1Document13 pagesSticky Notes 1Cristian Sergiu GeorgescuNo ratings yet
- 100 Percent Vs 80 Percent Breaker MythDocument4 pages100 Percent Vs 80 Percent Breaker Mythcow221100% (1)
- ZFSDocument24 pagesZFSAlphaQ by raks100% (1)
- An Application of Power Line Communication: Detection of Illegal Usage of ElectricityDocument23 pagesAn Application of Power Line Communication: Detection of Illegal Usage of Electricity2692rimmiNo ratings yet
- SoundcasterDocument3 pagesSoundcasterhhyj0% (1)
- Multi Theft Auto: San Andreas Manual: Before You StartDocument12 pagesMulti Theft Auto: San Andreas Manual: Before You Startara lar seyNo ratings yet
- DCS-933L A1 QIG v1.00 (EU)Document80 pagesDCS-933L A1 QIG v1.00 (EU)Prima Jaya abadiNo ratings yet
- Robot Con Labview y MyrioDocument90 pagesRobot Con Labview y MyrioZadiel MirelesNo ratings yet
- HCI Assignment No.2 BSCS 4 Spring 2019Document3 pagesHCI Assignment No.2 BSCS 4 Spring 2019Zubair TalibNo ratings yet
- Lab 1 QUBE-Servo Integration Workbook (Student)Document6 pagesLab 1 QUBE-Servo Integration Workbook (Student)Luis EnriquezNo ratings yet
- D2 PHASER Manual de PreinstalacionDocument45 pagesD2 PHASER Manual de Preinstalacionjdrojasa100% (1)
- Toshiba SSA-340A Ultrasound - Diagnostic Function ManualDocument160 pagesToshiba SSA-340A Ultrasound - Diagnostic Function Manualperla_canto_1100% (4)
- 07 GRP01 All EnginesDocument27 pages07 GRP01 All Engineseurospeed2No ratings yet
- Peak 150 ManualDocument122 pagesPeak 150 ManualyijnuusNo ratings yet
- Esteem 8 Installation Guide PDFDocument53 pagesEsteem 8 Installation Guide PDFKamal IsmailNo ratings yet
- ISAT-200 Installation ManualDocument49 pagesISAT-200 Installation ManualkamalmatsaidNo ratings yet
- Crossword 3Document4 pagesCrossword 3GodyNo ratings yet
- WC67K-80TX3200 Hydraulic Press Brake Machine With E21 NC ControllerDocument3 pagesWC67K-80TX3200 Hydraulic Press Brake Machine With E21 NC ControllerJohan SneiderNo ratings yet
- Stereo Magazine Issue 10Document59 pagesStereo Magazine Issue 10Naelectronic UONo ratings yet
- EcoWarn 12VDC o M Ecotechnic English NewDocument12 pagesEcoWarn 12VDC o M Ecotechnic English NewmodNo ratings yet