You might also like
- Indian Economy Notes - Vajiram Written Notes - UPSC IAS IPSDocument179 pagesIndian Economy Notes - Vajiram Written Notes - UPSC IAS IPSVikram Pagaria91% (137)
- Sample Power CurvesDocument15 pagesSample Power CurvesNasyith Hananur RohiemNo ratings yet
- Artificial Intelligence Course Summary by Mouli SankaranDocument43 pagesArtificial Intelligence Course Summary by Mouli SankaranChandramouleeswaran SankaranNo ratings yet
- Vignette 2Document464 pagesVignette 2Abhishek Ranjan100% (1)
- VR10 Ug EceDocument145 pagesVR10 Ug EceMannanHarshaNo ratings yet
- 1441957561Document356 pages1441957561Guilherme Augusto CecatoNo ratings yet
- Support Vector RegressionDocument15 pagesSupport Vector RegressionNastaran MoosaviNo ratings yet
- Lecture13 ANFISDocument43 pagesLecture13 ANFISWilldan Aprizal ArifinNo ratings yet
- Deep Learning Enabled Fault DiagnosisDocument18 pagesDeep Learning Enabled Fault DiagnosisNicolas Iturrieta BerriosNo ratings yet
- Introduction To MBSD - NotesDocument783 pagesIntroduction To MBSD - NotesmuradbashirNo ratings yet
- Art:10.1007/s00170 013 5065 ZDocument15 pagesArt:10.1007/s00170 013 5065 ZPradeep KunduNo ratings yet
- MATLAB Tutorial PDFDocument101 pagesMATLAB Tutorial PDFmuhammadmusakhanNo ratings yet
- Analytic Prognostic For Petrochemical PiDocument11 pagesAnalytic Prognostic For Petrochemical PiFrancesco TedescoNo ratings yet
- RKB Bearing FEA AnalysisDocument16 pagesRKB Bearing FEA AnalysisYan KhaiNo ratings yet
- Decision Support Model For Prioritizing Railway Level Crossings For Safety Improvements in Serbia: Application of Adaptive Neuro-Fuzzy SystemDocument16 pagesDecision Support Model For Prioritizing Railway Level Crossings For Safety Improvements in Serbia: Application of Adaptive Neuro-Fuzzy SystemDragan PamučarNo ratings yet
- Presentation On Model Order ReductionDocument26 pagesPresentation On Model Order ReductionlubnaNo ratings yet
- 6201-2Z - SKF Deep Groove Ball Bearing 6201-2Z 12mm I.D, 32mm ODocument2 pages6201-2Z - SKF Deep Groove Ball Bearing 6201-2Z 12mm I.D, 32mm Oyushveer002No ratings yet
- Lecture 3Document14 pagesLecture 3Benedicto MugongoNo ratings yet
- Chapter 2 System Approach To CBM-PHMDocument22 pagesChapter 2 System Approach To CBM-PHMDioNo ratings yet
- M2016-Scientific Computing With MATLAB-Paul Gribble-Math Eng Chap01 G Chap02Document114 pagesM2016-Scientific Computing With MATLAB-Paul Gribble-Math Eng Chap01 G Chap02hieuhuechNo ratings yet
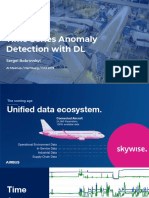
- Time Series Anomaly Detection With DLDocument18 pagesTime Series Anomaly Detection With DLAnonymous 9tJYscsNo ratings yet
- Fuzzy Inference SystemDocument10 pagesFuzzy Inference SystemPradeepdarshan PradeepNo ratings yet
- Free Vibration and Modal Analysis of Tower Crane Using SAP2000 and ANSYS PDFDocument10 pagesFree Vibration and Modal Analysis of Tower Crane Using SAP2000 and ANSYS PDFİsmailNo ratings yet
- 3 Matlab AnfisDocument28 pages3 Matlab AnfisThiru Mal JNo ratings yet
- Gads Dri 2021Document1,112 pagesGads Dri 2021Fabio Kazuo OshiroNo ratings yet
- Nptel: Sensing & ActuationDocument125 pagesNptel: Sensing & ActuationPranav RajNo ratings yet
- Week6 Matlab Fuzzy ExamplesDocument17 pagesWeek6 Matlab Fuzzy Examplesmekatronik_05No ratings yet
- Fault Detection ClassificationDocument210 pagesFault Detection ClassificationAnonymous GRb9L95LwzNo ratings yet
- 2012 Journal RIAC Web - 2Document36 pages2012 Journal RIAC Web - 2salaprove5157No ratings yet
- A Survey of Cyber-Physical SystemsDocument6 pagesA Survey of Cyber-Physical SystemsGeraldo CastroNo ratings yet
- Textbook6-Erik Cuevas - Alma Rodriguez - Metaheuristic Computation With MATLAB (R) - CRC Press (2020)Document281 pagesTextbook6-Erik Cuevas - Alma Rodriguez - Metaheuristic Computation With MATLAB (R) - CRC Press (2020)Ngoc Anh Cao MinhNo ratings yet
- Shigeaki Sakurai-Theory and Applications For Advanced Text Mining-InTech (2012)Document226 pagesShigeaki Sakurai-Theory and Applications For Advanced Text Mining-InTech (2012)Camila BastosNo ratings yet
- Deep Learning For Image Processing Using MATLABDocument19 pagesDeep Learning For Image Processing Using MATLABNetaji GandiNo ratings yet
- Development of An EV Drivetrain For A Small Car: Ambarish KulkarniDocument341 pagesDevelopment of An EV Drivetrain For A Small Car: Ambarish KulkarniSung Ryoung LimNo ratings yet
- Matlab Fourier Series Signal & SystemDocument15 pagesMatlab Fourier Series Signal & SystemNik Ahmad FaisalNo ratings yet
- Time Series Analysis With Matlab TutorialsDocument54 pagesTime Series Analysis With Matlab TutorialsbcrajasekaranNo ratings yet
- Analysis and Parameter Estimation of Li-Ion Batteries, Simulations For Electric VehiclesDocument8 pagesAnalysis and Parameter Estimation of Li-Ion Batteries, Simulations For Electric VehiclesCostache CatalinNo ratings yet
- White Paper On Wind Turbine Technology 2020-30Document12 pagesWhite Paper On Wind Turbine Technology 2020-30Sunil Ranjan MohapatraNo ratings yet
- 2020 RDS General Introduction 2020 06 25 - HandoutDocument35 pages2020 RDS General Introduction 2020 06 25 - Handoutyoonghm100% (1)
- 4b159ef4ffb0fc2576218555354780fcDocument374 pages4b159ef4ffb0fc2576218555354780fcYotaNo ratings yet
- Text AnalyticsDocument32 pagesText AnalyticsMahesh RamalingamNo ratings yet
- PDE For ModelicaDocument108 pagesPDE For ModelicaPriyam NayakNo ratings yet
- Modeling and Simulation of Wind TurbinesDocument128 pagesModeling and Simulation of Wind TurbinesDaniel_Gar_Wah_HoNo ratings yet
- Analytical Solutions Can Not Be ObtainedDocument120 pagesAnalytical Solutions Can Not Be ObtainedMuket AgmasNo ratings yet
- Signal Analysis Using MATLABDocument8 pagesSignal Analysis Using MATLABRajiv ShahNo ratings yet
- Component Reliability AnalysisDocument50 pagesComponent Reliability AnalysisriccardoNo ratings yet
- Draft - 2 - Spec - 200 KMPH Loco PDFDocument69 pagesDraft - 2 - Spec - 200 KMPH Loco PDFABHISHEK KUMARNo ratings yet
- Bz5xn Multiphysics Anfd Multiscale Modeling Techniques and ApplicationsDocument419 pagesBz5xn Multiphysics Anfd Multiscale Modeling Techniques and ApplicationsGeorgie VegaNo ratings yet
- 3530 405 Pvi H 205 02Document12 pages3530 405 Pvi H 205 02venkateshbitraNo ratings yet
- Enterprise Asset Management For Ports, TereminalsDocument2 pagesEnterprise Asset Management For Ports, TereminalsAinyeéArwalyéNo ratings yet
- An Automated Quadcopter CAD Based Design and Modeling Platform Using Solidworks API and Smart Dynamic AssemblyDocument10 pagesAn Automated Quadcopter CAD Based Design and Modeling Platform Using Solidworks API and Smart Dynamic AssemblyNeeox- NuNo ratings yet
- (Multiphysics Modeling) Mehrzad Tabatabaian-COMSOL For Engineers-Mercury Learning & Information (2014)Document272 pages(Multiphysics Modeling) Mehrzad Tabatabaian-COMSOL For Engineers-Mercury Learning & Information (2014)MZNo ratings yet
- DMDW Full PDFDocument784 pagesDMDW Full PDFIrimescu AndreiNo ratings yet
- DP by Bellman Functional EquationDocument296 pagesDP by Bellman Functional Equation.cadeau01No ratings yet
- Data Driven Model Discovery and Coordinate Embeddings For Physical Systems by Nathan Kutz, University of WashingtonDocument43 pagesData Driven Model Discovery and Coordinate Embeddings For Physical Systems by Nathan Kutz, University of WashingtonMatías AlemánNo ratings yet
- Reduced Order Modelling For Flow Control (Edited by BERND R. NOACK, MAREK MORZYNSKI, GILEAD TADMOR)Document340 pagesReduced Order Modelling For Flow Control (Edited by BERND R. NOACK, MAREK MORZYNSKI, GILEAD TADMOR)Jawad KhawarNo ratings yet
- LQR FeedforwardDocument20 pagesLQR Feedforwardsri248No ratings yet
- Multi Scale Reliability and Serviceability Assessment of in Service PDFDocument170 pagesMulti Scale Reliability and Serviceability Assessment of in Service PDFasuasuNo ratings yet
- 2004 Book ModelOrderReductionTechniques PDFDocument379 pages2004 Book ModelOrderReductionTechniques PDFshowbhutNo ratings yet
- InTech-Control Designs For Linear Systems Using State Derivative FeedbackDocument29 pagesInTech-Control Designs For Linear Systems Using State Derivative FeedbackManmatha KrishnanNo ratings yet
- Discrete-Time Nonlinear Sliding Mode Controller: Nikhil Kumar Yadav, R.K. SinghDocument7 pagesDiscrete-Time Nonlinear Sliding Mode Controller: Nikhil Kumar Yadav, R.K. SinghHamza MasreNo ratings yet
- Smith 1997Document5 pagesSmith 1997Lucas SantosNo ratings yet
- India's Cyber Security Challenges PDFDocument96 pagesIndia's Cyber Security Challenges PDFAbhishek RanjanNo ratings yet
- Aldeen IEE-CTA 1992Document10 pagesAldeen IEE-CTA 1992Abhishek RanjanNo ratings yet
- Engineering Academy: Gate - 2011 Syllabus Instrumentation EngineeringDocument2 pagesEngineering Academy: Gate - 2011 Syllabus Instrumentation EngineeringAbhishek RanjanNo ratings yet
- Instrumentation and Control Department, NTPC Badarpur Summer Training Report FullDocument42 pagesInstrumentation and Control Department, NTPC Badarpur Summer Training Report FullAbhishek Ranjan89% (9)
- Manipal Institute of Technology, Manipal: Department of Instrumentation & Control EngineeringDocument5 pagesManipal Institute of Technology, Manipal: Department of Instrumentation & Control EngineeringAbhishek RanjanNo ratings yet
- MT1173 AlgebraDocument2 pagesMT1173 AlgebraAlex ZhangNo ratings yet
- Dimension Reduction: P Adraig Cunningham University College DublinDocument24 pagesDimension Reduction: P Adraig Cunningham University College DublinRam VivekNo ratings yet
- A Matrix Model of Population Growth: Assisted byDocument8 pagesA Matrix Model of Population Growth: Assisted byDesi herlinaNo ratings yet
- 1 5 Hong Kong Baptist University SEMESTER 1 EXAMINATION, 1999-2000Document5 pages1 5 Hong Kong Baptist University SEMESTER 1 EXAMINATION, 1999-2000KudzaiNo ratings yet
- Civil I Engineering Mathematics I (15mat11) AssignmentDocument13 pagesCivil I Engineering Mathematics I (15mat11) AssignmentDAVIDNo ratings yet
- Eigen Values and Eigen Vectors: Characteristic MatrixDocument12 pagesEigen Values and Eigen Vectors: Characteristic MatrixShadman Saqlain Rahman, 170021057100% (1)
- Buildings 12 00838 v2Document21 pagesBuildings 12 00838 v2Mia S. RetomeNo ratings yet
- "The Influence of Culture On Cosmetics Consumer Behavior": Mrs. Hemapatil, DR - BbakkappaDocument7 pages"The Influence of Culture On Cosmetics Consumer Behavior": Mrs. Hemapatil, DR - BbakkappaMudassirah RustamNo ratings yet
- HW 3Document2 pagesHW 3Yeshan JuberiNo ratings yet
- 50 Questions Linear Algebra Net Gate AspirantsDocument10 pages50 Questions Linear Algebra Net Gate AspirantsAkram JavaidNo ratings yet
- Centrality MeasuresDocument56 pagesCentrality MeasuresThang TruongNo ratings yet
- LabVIEW Math Function TableDocument4 pagesLabVIEW Math Function Tableslu9900No ratings yet
- GATE EE 2022 (With Solutions) - FinalDocument57 pagesGATE EE 2022 (With Solutions) - FinalDuppalapudi SainadhNo ratings yet
- Orthogonal Transforms For Digital Signal ProcessingDocument5 pagesOrthogonal Transforms For Digital Signal ProcessingCezara RasinarNo ratings yet
- 3024 PS1 Solutions Comic GroupDocument6 pages3024 PS1 Solutions Comic Groupmpl12345678No ratings yet
- GMT Manpages PDFDocument478 pagesGMT Manpages PDFPaul CaesarNo ratings yet
- Craig-Bampton ModelDocument14 pagesCraig-Bampton ModelYassir NjNo ratings yet
- Nonlinear FE Analysis 2009 1Document40 pagesNonlinear FE Analysis 2009 1Venkata NarayanaNo ratings yet
- Sastra University B.Tech Mechanical Engineering Syllabus 1st YearDocument25 pagesSastra University B.Tech Mechanical Engineering Syllabus 1st YearA Ariff Mohammed TajdeenNo ratings yet
- Phys 601Document2 pagesPhys 601Cherinet SamNo ratings yet
- Btech It Curriculum Reg2015 PDFDocument362 pagesBtech It Curriculum Reg2015 PDFParth GuptaNo ratings yet
- MATLAB Linear AlgebraDocument39 pagesMATLAB Linear AlgebraRaine OrtegaNo ratings yet
- Ma580 BookDocument101 pagesMa580 BookJosephNo ratings yet
- Numerical Evaluation of Energy Levels and Wave Functions For Hindered Internal RotationDocument8 pagesNumerical Evaluation of Energy Levels and Wave Functions For Hindered Internal RotationAitor PastorNo ratings yet
- GMT ManpagesDocument478 pagesGMT ManpagesjmejugonNo ratings yet
- Contractor Selection 1Document8 pagesContractor Selection 1Hatem HejaziNo ratings yet
- Composite TpeDocument11 pagesComposite TpeAnyah Sampson ObassiNo ratings yet
- The Ten Martini ProblemDocument42 pagesThe Ten Martini ProblemΧάρης ΦραντζικινάκηςNo ratings yet
- CCS Module 1Document127 pagesCCS Module 1ADLURI SRIKARNo ratings yet